Hi @anaam.mostafiz,
I just cloned your rosject, and tried the command.
For me, at first it didn’t open the gzclient (the graphical visualization of the simulation)
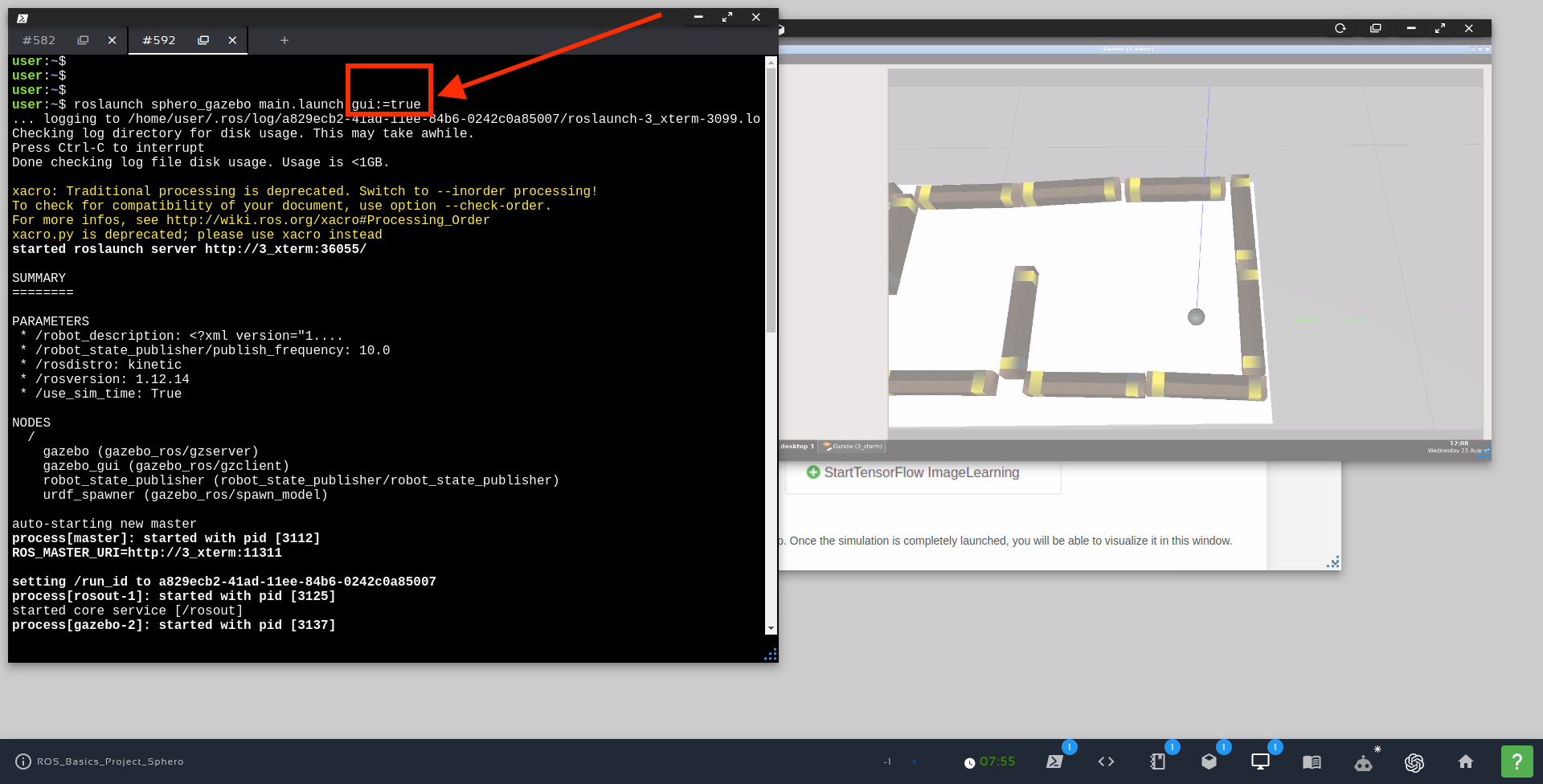
But then I used the gui:= true argument, and the simulation appeared as expected.
This is the command I used:
roslaunch sphero_gazebo main.launch gui:=true
Below we have my screenshot: