Hi again
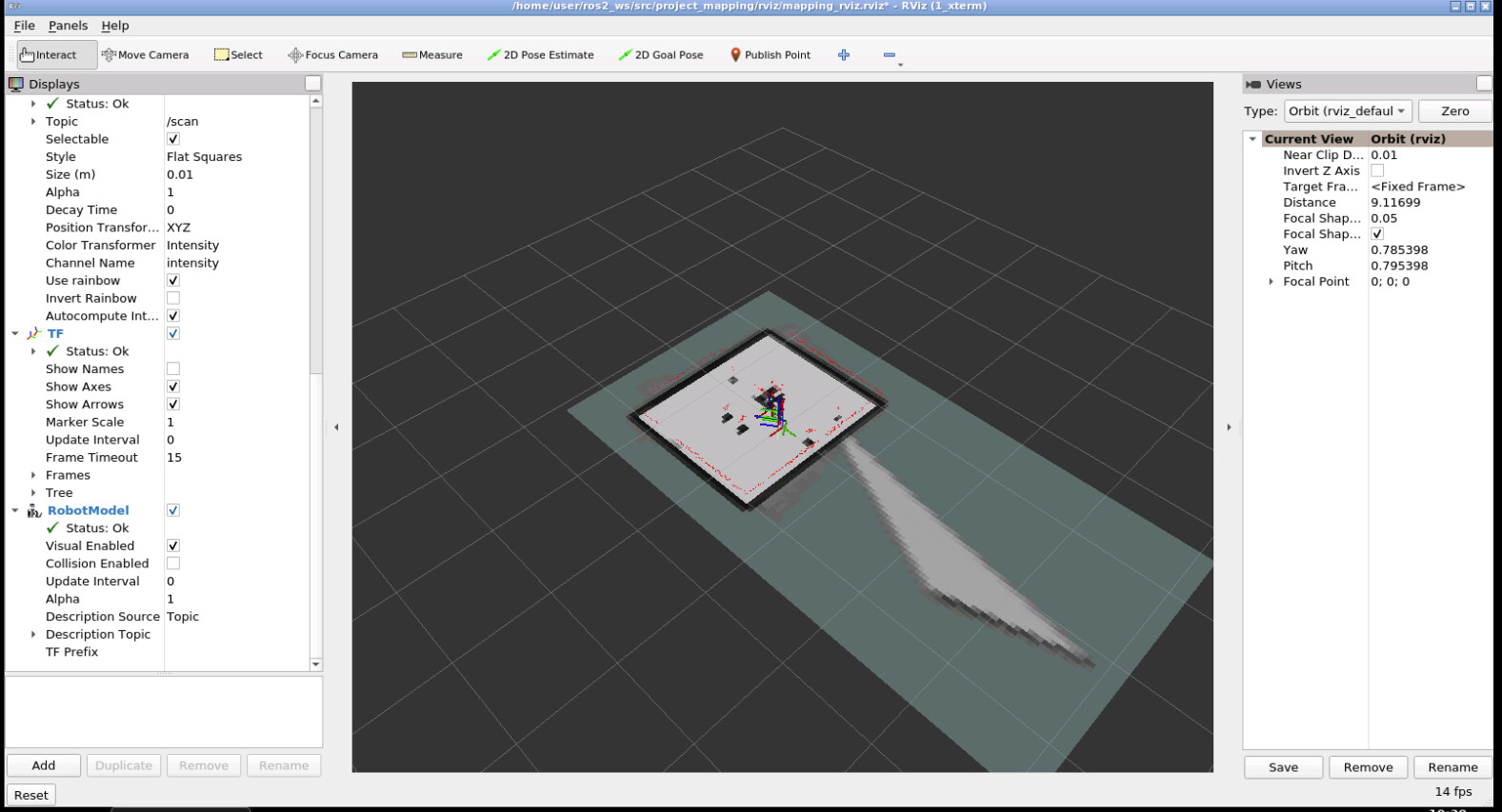
I thought it was solved by following the instructions described in ROS2 Nav2 Course project problems to another student but, even the transform data seems to be ok, the map includes an extra area ¿?
Thanks again

Hi again
I thought it was solved by following the instructions described in ROS2 Nav2 Course project problems to another student but, even the transform data seems to be ok, the map includes an extra area ¿?
Thanks again