I have set everything “correctly” I don’t receive error in Rviz and even in my gmapping node.
the laser conversion is done successfully I suppose because it is showed in Rviz such as in the construct tutorials…
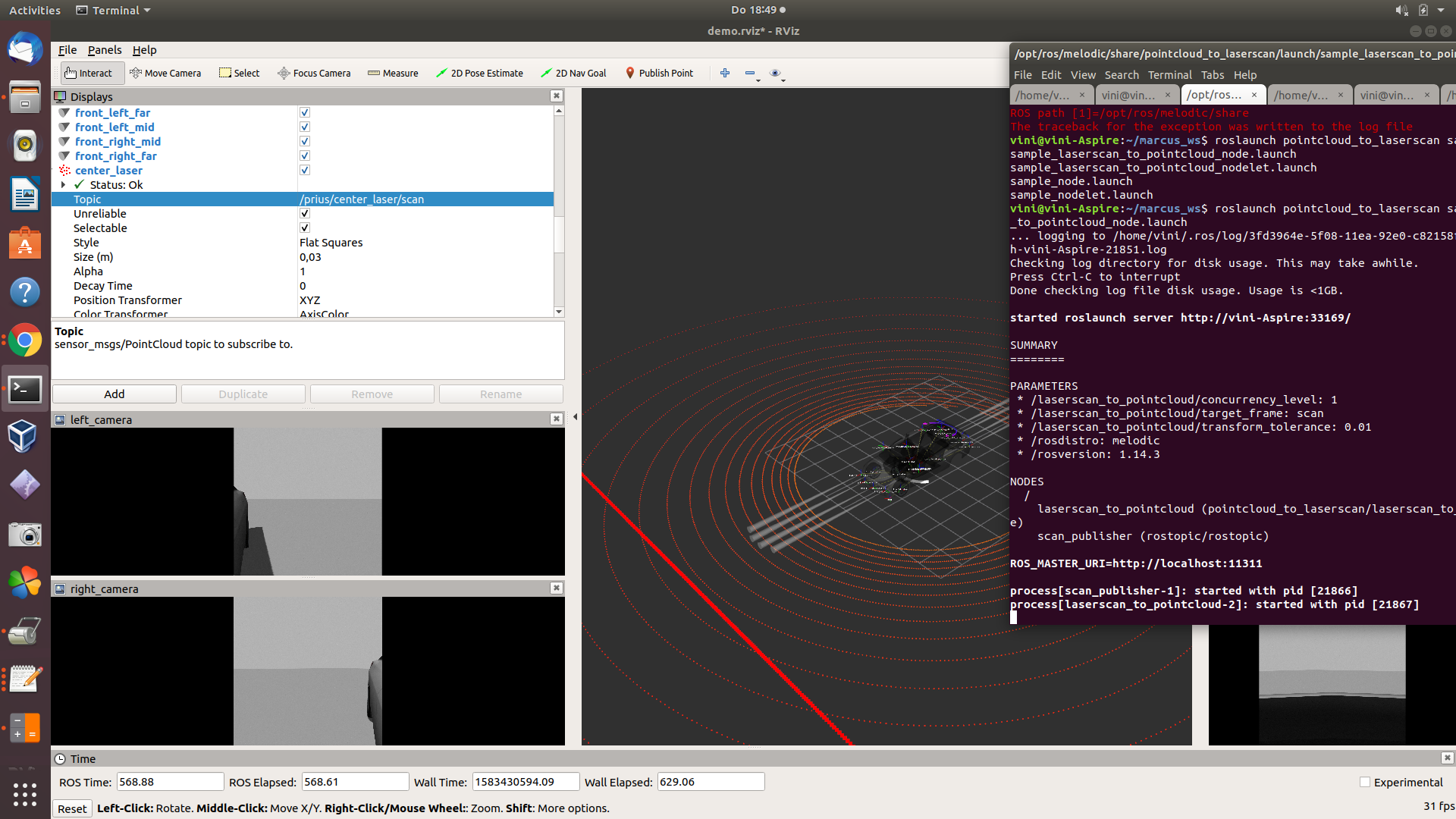

However I cannot understand why the map keeps not being received…