Hi
I need help with the “3.10 Topics Quiz”. I’m completing the tasks, but in submission, the last error message was “Robot did not reach the correct final position.” However, the rover is reaching the point within a 0.1 margin and 90 seconds. I copied the output below also.
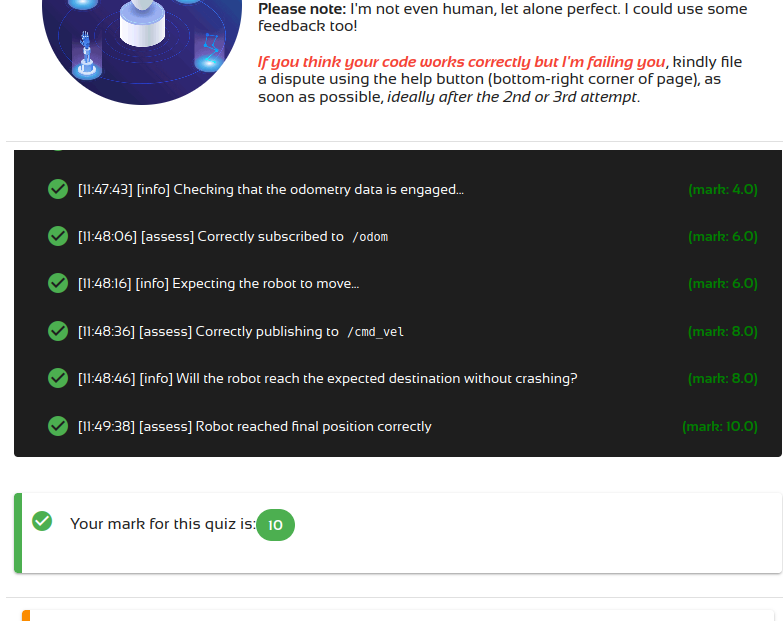
Feedback from the last successful autocorrection:
![]() [08:45:26] [info] Setting up ROS2 environment (mark: 0)
[08:45:26] [info] Setting up ROS2 environment (mark: 0)
![]() [08:45:26] [info] ROS2 environment setup is okay (mark: 0)
[08:45:26] [info] ROS2 environment setup is okay (mark: 0)
![]() [08:45:27] [assess]
[08:45:27] [assess] topics_quiz package found (mark: 1.0)
![]() [08:45:32] [info] compiling package
[08:45:32] [info] compiling package topics_quiz… (mark: 1.0)
![]() [08:45:34] [assess]
[08:45:34] [assess] topics_quiz package compiled successfully (mark: 3.0)
![]() [08:45:34] [info] Seeing if the package can be launched… (mark: 3.0)
[08:45:34] [info] Seeing if the package can be launched… (mark: 3.0)
![]() [08:45:49] [assess] Can launch
[08:45:49] [assess] Can launch topics_quiz package successfully (mark: 4.0)
![]() [08:45:59] [info] Checking that the odometry data is engaged… (mark: 4.0)
[08:45:59] [info] Checking that the odometry data is engaged… (mark: 4.0)
![]() [08:46:22] [assess] Correctly subscribed to
[08:46:22] [assess] Correctly subscribed to /odom (mark: 6.0)
![]() [08:46:32] [info] Expecting the robot to move… (mark: 6.0)
[08:46:32] [info] Expecting the robot to move… (mark: 6.0)
![]() [08:46:52] [assess] Correctly publishing to
[08:46:52] [assess] Correctly publishing to /cmd_vel (mark: 8.0)
![]() [08:47:03] [info] Will the robot reach the expected destination without crashing? (mark: 8.0)
[08:47:03] [info] Will the robot reach the expected destination without crashing? (mark: 8.0)
![]() [08:49:30] [assess] Robot did not reach the correct final position. Not happy!
[08:49:30] [assess] Robot did not reach the correct final position. Not happy!
- Is your logic reacting properly to the laser odom message?
- Check the instructions for the expected final position of the robot.
- Your robot is expected to arrive at the final position within 90 seconds.
- Is your robot colliding with the wall? (mark: 8.0)
Pose at home position
pose:
pose:
position:
x: -0.00915335770696402
y: -0.0547806546092033
z: -0.0132122561335564
orientation:
x: 0.0
y: 0.0
z: 0.2458728417481974
w: 0.9693020920696839
Pose at Pick Up Point
pose:
pose:
position:
x: -2.27974724769592
y: -2.36799883842468
z: -0.0132122561335564
orientation:
x: 0.0
y: 0.0
z: -0.9631307300201547
w: 0.2690338210910366