Concerning:
I am currently working on the “Understanding ROS2 Topics” chapter and I am stuck at part “3.2.1 Create a Simple Publisher Node”.
Issue:
I can’t start the launch file for this part.
Proceedure:
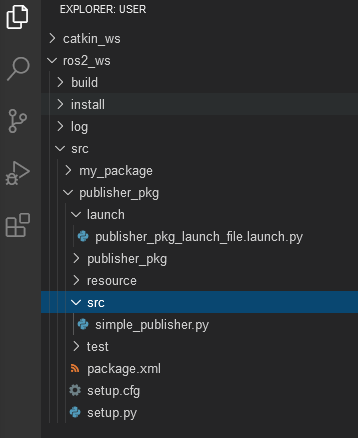
I have created my package, I made a script, I made a launch file and I made the changes in the setup.py file. I can use colcon build --packages-select publisher_pkg with the following output:
Starting >>> publisher_pkg
Finished <<< publisher_pkg [1.28s]
Summary: 1 package finished [1.49s]
When I try to start the launch file with ros2 launch publisher_pkg publisher_pkg_launch_file.launch.py, I get the following output:
[INFO] [launch]: All log files can be found below /home/user/.ros/log/2022-03-14-08-32-19-098299-2_xterm-3428
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [simple_publisher-1]: process started with pid [3430]
[simple_publisher-1] Traceback (most recent call last):
[simple_publisher-1] File "/home/user/ros2_ws/install/publisher_pkg/lib/publisher_pkg/simple_publisher", line 11, in <module>
[simple_publisher-1] load_entry_point('publisher-pkg==0.0.0', 'console_scripts', 'simple_publisher')()
[simple_publisher-1] File "/usr/lib/python3/dist-packages/pkg_resources/__init__.py", line 490, in load_entry_point
[simple_publisher-1] return get_distribution(dist).load_entry_point(group, name)
[simple_publisher-1] File "/usr/lib/python3/dist-packages/pkg_resources/__init__.py", line 2854, in load_entry_point
[simple_publisher-1] return ep.load()
[simple_publisher-1] File "/usr/lib/python3/dist-packages/pkg_resources/__init__.py", line 2445, in load
[simple_publisher-1] return self.resolve()
[simple_publisher-1] File "/usr/lib/python3/dist-packages/pkg_resources/__init__.py", line 2451, in resolve
[simple_publisher-1] module = __import__(self.module_name, fromlist=['__name__'], level=0)
[simple_publisher-1] ModuleNotFoundError: No module named 'publisher_pkg.simple_publisher'
[ERROR] [simple_publisher-1]: process has died [pid 3430, exit code 1, cmd '/home/user/ros2_ws/install/publisher_pkg/lib/publisher_pkg/simple_publisher --ros-args'].
My Python script looks like this:
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import Twist
class SimplePublisher(Node):
def __init__(self):
super().__init__('simple_publisher')
self.publisher_ = self.create_publisher(Twist, '/cmd_vel', 10)
timer_period = 0.5
self.timer = self.create_timer(timer_period, self.timer_callback)
def timer_callback(self):
msg = Twist()
msg.linear.x = 0.5
msg.angular.z = 0.5
self.publisher_.publish(msg)
self.get_logger().info('Publishing: "%s"' % msg)
def main(args=None):
rclpy.init(args=args)
simple_publisher = SimplePublisher()
rclpy.spin(simple_publisher)
simple_publisher.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
My launch file looks like this:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='publisher_pkg',
executable='simple_publisher',
output='screen'),
])
My setup.py file looks like this:
from setuptools import setup
import os
from glob import glob
package_name = 'publisher_pkg'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name), glob('launch/*.launch.py'))
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='user',
maintainer_email='user@todo.todo',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
'simple_publisher = publisher_pkg.simple_publisher:main'
],
},
)