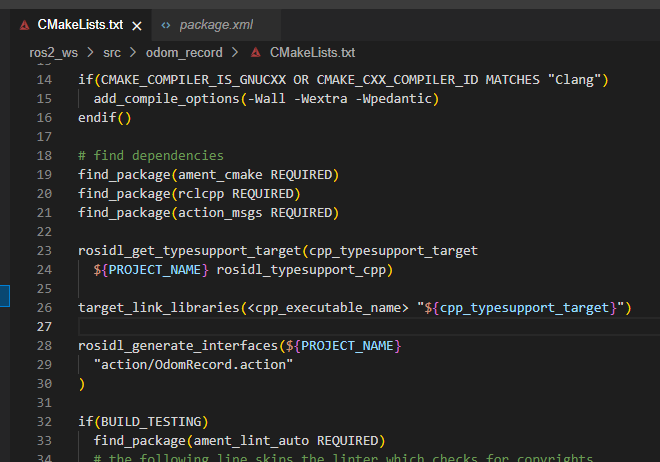
Here is my CMakeLists.txt and package.xml and the error and hierarchy in folder structure:
cmake_minimum_required(VERSION 3.5)
project(odom_record)
Default to C99
if(NOT CMAKE_C_STANDARD)
set(CMAKE_C_STANDARD 99)
endif()
Default to C++14
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 14)
endif()
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES “Clang”)
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(action_msgs REQUIRED)
find_package(rosidl_default_generators REQUIRED)
install(
DIRECTORY launch urdf models meshes worlds action config map
DESTINATION share/${PROJECT_NAME}
)
rosidl_generate_interfaces(${PROJECT_NAME}
“action/OdomRecord.action”
)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
the following line skips the linter, which checks for copyrights
uncomment the line when copyright and license are not present in all source files
#set(ament_cmake_copyright_FOUND TRUE)
the following line skips cpplint (only works in a git repo)
uncomment the line when this package is not in a git repo
#set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()
<?xml version="1.0"?> <?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?> odom_record 0.0.0 TODO: Package description user TODO: License declaration<buildtool_depend>ament_cmake</buildtool_depend>
rclpy
rclpp
std_msgs
geometry_msgs
action_msgs
<build_depend>rosidl_default_generators</build_depend>
<exec_depend>rosidl_default_runtime</exec_depend>
<member_of_group>rosidl_interface_packages</member_of_group>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
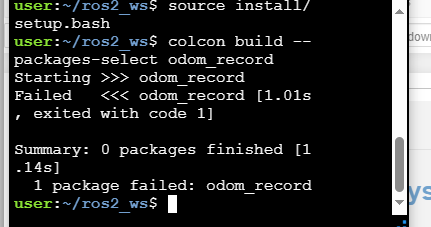
Others have success in this second custom interface for an action in Rosject. For some reason it doesn’t like the necessary dependency on action_msgs.