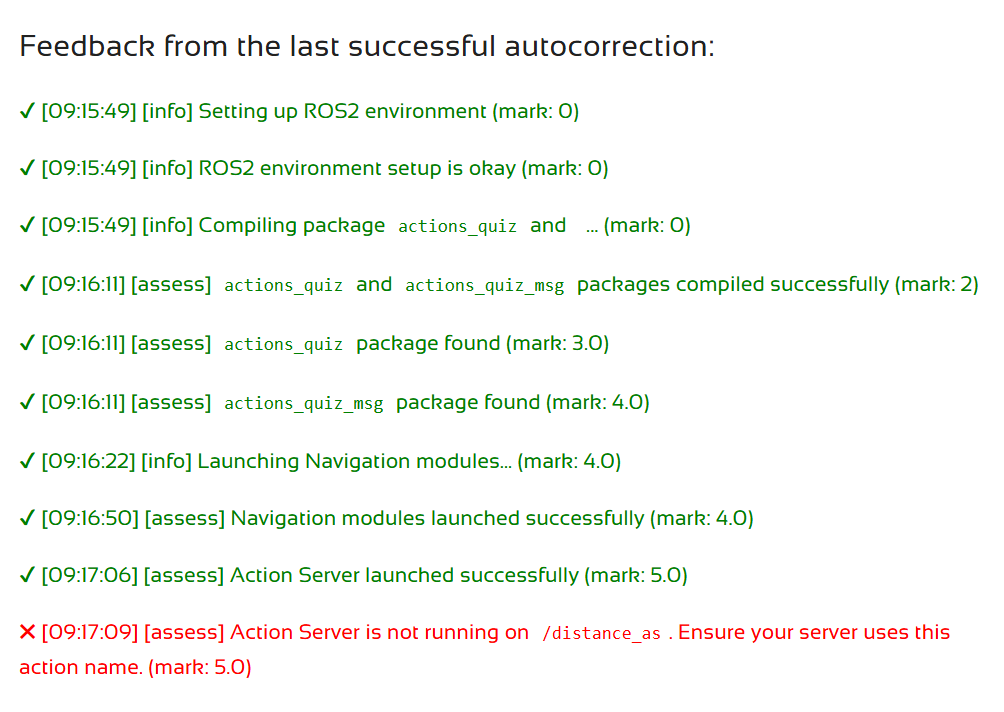
It tells me the /distance_as action server is not running but when i start the navigation (ros2 launch leo_description loc_nav.launch.py) and my action server(ros2 launch actions_quiz actions_quiz_server.launch.py) myself through the terminal,
I get this result when listing the available actions:
user:~/ros2_ws$ ros2 action list
/distance_as
/spin
user:~/ros2_ws$ ros2 action info /distance_as -t
Action: /distance_as
Action clients: 0
Action servers: 1
/my_action_server [actions_quiz_msg/action/Distance]
Here is the code where i create the action server (do i have to specify the / in the name here to sucessfully get throug the auto correction?)
Or is there another issue that i dont check when just listing the actions to verify if its running correctly?
When i use my client it seems to me that all works correctly…
# Action server to accept goals
self.action_server = ActionServer(
self, Distance, 'distance_as', self.execute_callback)
Here is the whole action_server.py for reference if ther is another issue with that…
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import PoseWithCovarianceStamped
from nav2_msgs.action import NavigateToPose
from rclpy.action import ActionClient, ActionServer
from tf_transformations import quaternion_from_euler
from action_msgs.msg import GoalStatus
import time
from actions_quiz_msg.action import Distance
class MyActionServer(Node):
def __init__(self):
super().__init__('my_action_server')
self.distance_traveled_set = False
# Action server to accept goals
self.action_server = ActionServer(
self, Distance, 'distance_as', self.execute_callback)
# Publisher to set initial pose
self.initial_pose_publisher = self.create_publisher(
PoseWithCovarianceStamped, '/initialpose', 10)
# Action client for navigation to pose
self.nav_to_pose_client = ActionClient(
self, NavigateToPose, '/navigate_to_pose')
# Wait for the localization node to be ready
self.wait_for_localization()
# Set the initial pose to (0, 0, 0)
self.set_initial_pose(0.0, 0.0, 0.0)
def wait_for_localization(self):
self.get_logger().info("Waiting for localization to be active...")
amcl_pose_topic = '/amcl_pose'
while not self.count_subscribers('/initialpose') > 0:
self.get_logger().info("Waiting for subscribers to /initialpose...")
time.sleep(1.0)
while not self.topic_exists(amcl_pose_topic):
self.get_logger().info(f"Waiting for {amcl_pose_topic} topic...")
time.sleep(1.0)
self.get_logger().info("Localization is active.")
def topic_exists(self, topic_name):
topics = self.get_topic_names_and_types()
return any(topic[0] == topic_name for topic in topics)
def set_initial_pose(self, x, y, yaw):
"""Publish the initial pose to the /initialpose topic multiple times."""
initial_pose = PoseWithCovarianceStamped()
initial_pose.header.frame_id = 'map'
initial_pose.header.stamp = self.get_clock().now().to_msg()
initial_pose.pose.pose.position.x = x
initial_pose.pose.pose.position.y = y
# Set the orientation as quaternion (for yaw rotation)
q = quaternion_from_euler(0, 0, yaw)
initial_pose.pose.pose.orientation.x = q[0]
initial_pose.pose.pose.orientation.y = q[1]
initial_pose.pose.pose.orientation.z = q[2]
initial_pose.pose.pose.orientation.w = q[3]
# Publish the initial pose multiple times
for i in range(10):
self.initial_pose_publisher.publish(initial_pose)
self.get_logger().info(f"Publishing initial pose ({i+1}/10)")
time.sleep(0.1)
self.get_logger().info(f"Initial pose set to x: {x}, y: {y}, yaw: {yaw}")
async def execute_callback(self, goal_handle):
"""Handle the incoming goal request."""
self.get_logger().info('Received goal request')
x = goal_handle.request.x
y = goal_handle.request.y
yaw = goal_handle.request.yaw
self.get_logger().info(f"Navigating to: x={x}, y={y}, yaw={yaw}")
# Store the goal handle for later use in the feedback callback
self.current_goal_handle = goal_handle
# Send navigation goal
result = await self.send_navigation_goal(x, y, yaw)
if result:
self.get_logger().info('Goal reached successfully!')
goal_handle.succeed()
return Distance.Result(success=True, distance_traveled=self.distance_traveled)
else:
self.get_logger().info('Failed to reach goal :(')
goal_handle.abort()
return Distance.Result(success=False)
async def send_navigation_goal(self, x, y, yaw):
"""Send a navigation goal using the NavigateToPose action."""
goal_msg = NavigateToPose.Goal()
# Set goal position
goal_msg.pose.pose.position.x = x
goal_msg.pose.pose.position.y = y
# Set goal orientation (yaw as quaternion)
q = quaternion_from_euler(0, 0, yaw)
goal_msg.pose.pose.orientation.x = q[0]
goal_msg.pose.pose.orientation.y = q[1]
goal_msg.pose.pose.orientation.z = q[2]
goal_msg.pose.pose.orientation.w = q[3]
# Set the frame and timestamp
goal_msg.pose.header.frame_id = 'map'
goal_msg.pose.header.stamp = self.get_clock().now().to_msg()
# Wait for the NavigateToPose action server
self.get_logger().info("Waiting for the NavigateToPose action server...")
self.nav_to_pose_client.wait_for_server()
# Send the goal
self.get_logger().info(f"Sending navigation goal to: x={x}, y={y}, yaw={yaw}")
send_goal_future = self.nav_to_pose_client.send_goal_async(goal_msg, feedback_callback=self.nav_to_pose_feedback_callback)
nav_goal_handle = await send_goal_future
if not nav_goal_handle.accepted:
self.get_logger().info('Navigation goal rejected')
return False
self.get_logger().info('Navigation goal accepted')
# Wait for result
get_result_future = nav_goal_handle.get_result_async()
nav_result = await get_result_future
if nav_result.status == GoalStatus.STATUS_SUCCEEDED:
self.get_logger().info('Navigation succeeded')
return True
else:
self.get_logger().info(f'Navigation failed with status: {nav_result.status}')
return False
async def nav_to_pose_feedback_callback(self, feedback_msg):
"""Handle feedback and send it to the action server as feedback."""
if self.current_goal_handle is None:
self.get_logger().warn("No current goal handle available for feedback.")
return
distance_left = feedback_msg.feedback.distance_remaining
if not self.distance_traveled_set and distance_left != 0:
self.get_logger().info(f"Distance remaining max = distance traveled = {distance_left}")
self.distance_traveled = distance_left
self.distance_traveled_set = True
self.get_logger().info(f"Distance remaining to goal: {distance_left} meters")
# Prepare the feedback message for the custom action
feedback = Distance.Feedback()
feedback.distance_left = distance_left
# Publish the feedback
try:
# Publish feedback safely
self.current_goal_handle.publish_feedback(feedback)
except Exception as e:
self.get_logger().error(f"Failed to publish feedback: {e}")
def main(args=None):
rclpy.init(args=args)
node = MyActionServer()
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()