I am taking the actions_quiz, the drone takes off and lands (without the drone taking off first) correctly in the simulation. However, Gradebot marked the landing as incorrect. The code I have is as follows.
#!/usr/bin/env python
import rospy
import actionlib
from actions_quiz.msg import CustomActionMsgAction, CustomActionMsgFeedback
from std_msgs.msg import Empty
from geometry_msgs.msg import Twist # Import Twist for velocity control
class DroneActionServer:
def __init__(self):
# Create the action server
self._as = actionlib.SimpleActionServer('/action_custom_msg_as', CustomActionMsgAction, self.execute_callback, False)
self._as.start()
# Publishers for takeoff, landing, and velocity control
self.takeoff_pub = rospy.Publisher('/drone/takeoff', Empty, queue_size=1)
self.land_pub = rospy.Publisher('/drone/land', Empty, queue_size=1)
self.velocity_pub = rospy.Publisher('/cmd_vel', Twist, queue_size=1) # Velocity control publisher
self.feedback = CustomActionMsgFeedback()
self.rate = rospy.Rate(1)
def execute_callback(self, goal):
if goal.goal == "TAKEOFF":
rospy.loginfo("Taking off...")
# Publish Empty message to takeoff topic (if necessary)
rospy.sleep(1)
self.takeoff_pub.publish(Empty())
# Use velocity control to simulate takeoff by increasing the z-axis velocity
takeoff_twist = Twist()
takeoff_twist.linear.z = 0.5 # Positive z velocity to go up
self.velocity_pub.publish(takeoff_twist)
self.feedback.feedback = "Taking off"
rospy.sleep(2) # Let the drone ascend for 3 seconds
# Stop the drone by setting zero velocity
takeoff_twist.linear.z = 0.0
self.velocity_pub.publish(takeoff_twist)
elif goal.goal == "LAND":
rospy.loginfo("Landing...")
# Use velocity control to simulate landing by decreasing the z-axis velocity
landing_twist = Twist()
landing_twist.linear.z = -0.5 # Negative z velocity to go down
rospy.sleep(1)
self.velocity_pub.publish(landing_twist)
self.feedback.feedback = "Landing"
rospy.sleep(6) # Let the drone descend for 3 seconds
# Stop the drone by setting zero velocity
landing_twist.linear.z = 0.0
self.velocity_pub.publish(landing_twist)
# Optionally, publish to land topic (if needed for integration with other nodes)
self.land_pub.publish(Empty())
self._as.set_succeeded()
if __name__ == '__main__':
rospy.init_node('drone_action_server')
DroneActionServer()
rospy.spin()
The feedback from the gradebot is as attached.
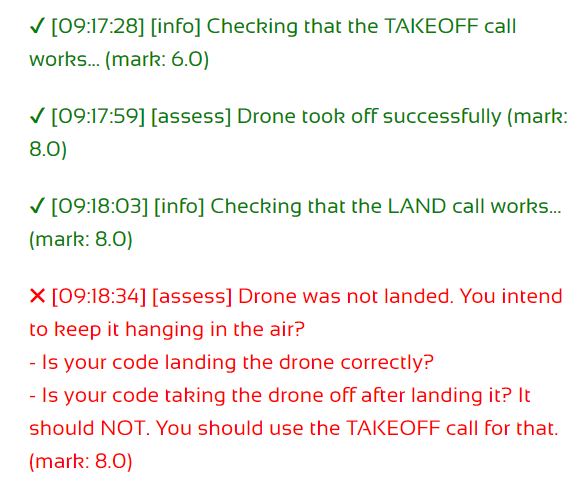
I can manually see in the simulation that the drone is landing. Kindly advice on why this is happening and how I can fix it.