Hello,
Please see picture below
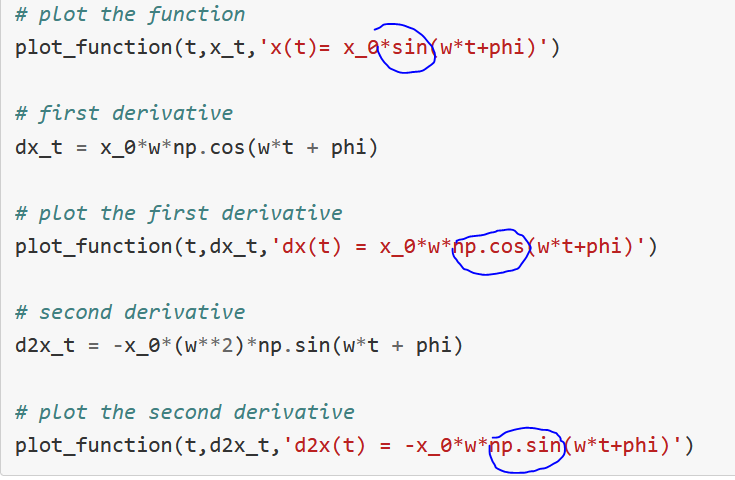
The syntax form in my opinion is
plot_function(t,dx_t,'dx(t) = x_0*w*cos(w*t + phi)')
plot_function(t,d2x_t,'d2x(t) = -x_0*w^2*sin(w*t + phi)')
Hello,
Please see picture below
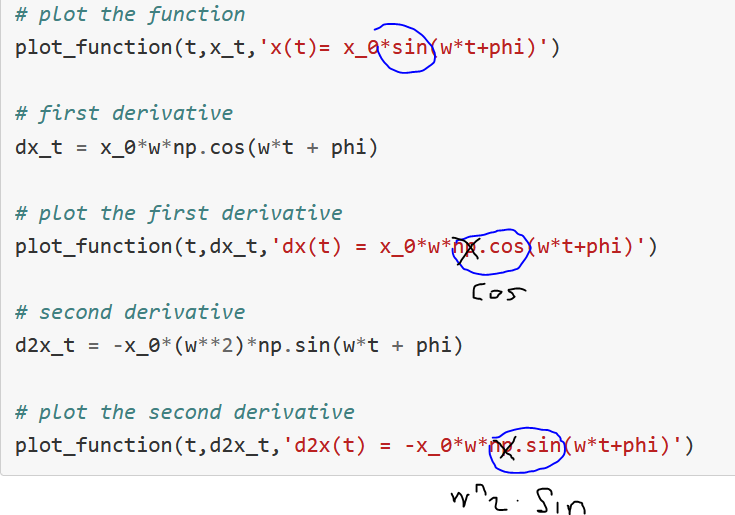
The syntax form in my opinion is
plot_function(t,dx_t,'dx(t) = x_0*w*cos(w*t + phi)')
plot_function(t,d2x_t,'d2x(t) = -x_0*w^2*sin(w*t + phi)')
Let’s check this and get back to you.
Hello @TAURD ,
Fixed in the notebook. Thanks for the feedback.
This topic was automatically closed after 13 hours. New replies are no longer allowed.