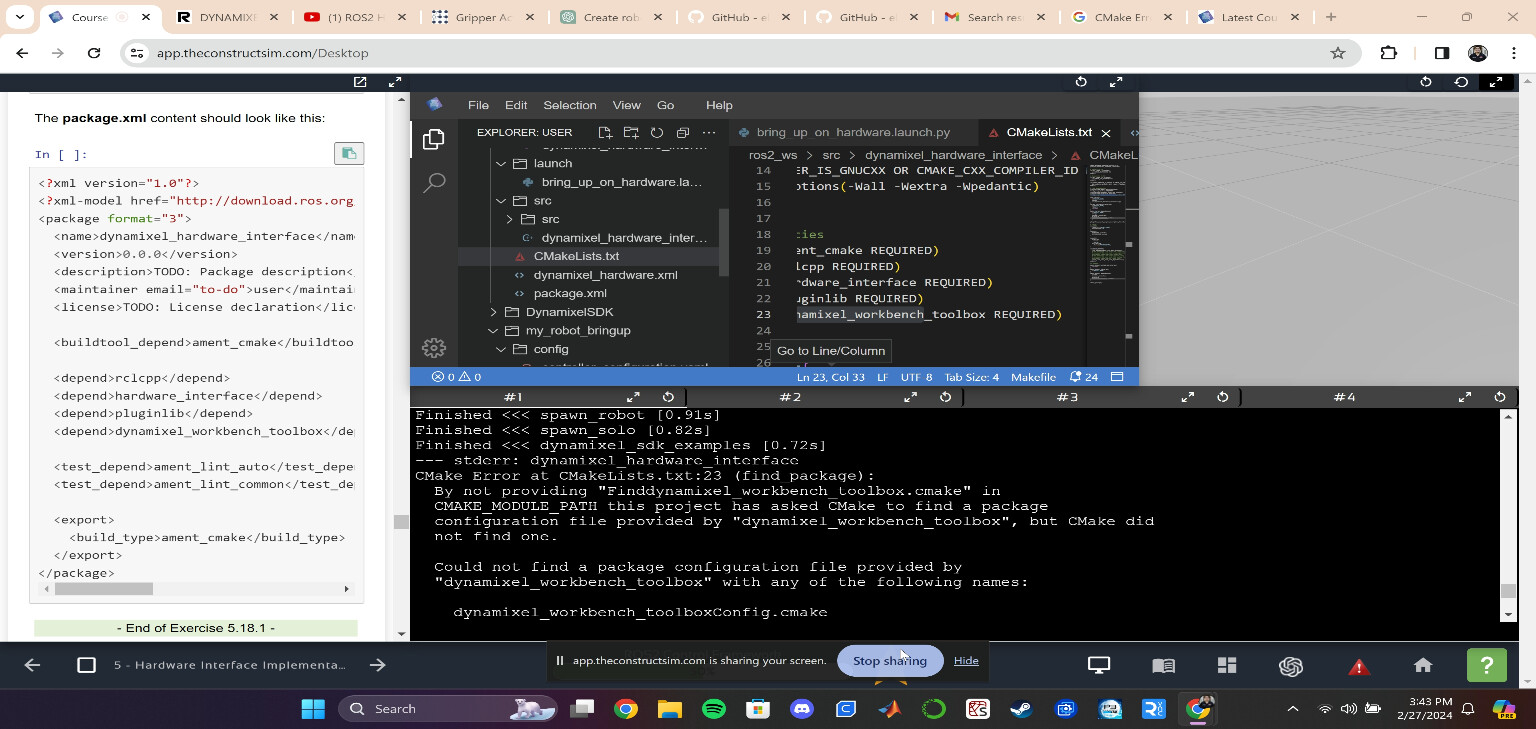
I was working in the ROS2 Control Framework course. Everything has worked so far. I ran into issues building the Unit 5 packages for the Dynamixel Motor Control framework for the connection to ros2 controls. The issue that pops in is that it is a simple Cmake error of that it cannot read the package information but it states it cannot find a required package called dynamixel_workbench_toolbox which was supposedly added in the cmake file following the instructions on how to access it and I even copied the content of the desired XML format needed and the cmake file after I saw this error in case I forgot extra dependencies in the importation of these code. I understand what it could be but want to know your insights on how to fix it before progressing the course to test and see.</p>
You have forgotten to download (clone) the Dynamixel Libraries from the provided Bitbucket repository source link.
You have forgotten to add the dynamixel_workbench_toolbox as a depedency in either your CMakeLists.txt and/or package.xml file(s).
I have checked this specific part of this course and it currently works for me as-is.
Please go through the course instructions again to do the missing steps.
Thank you for your quick response. I was able to fix it you were correct I skipped the part of cloning the dynamixel library. I swore I did that step but I confused it with the step of the Dynamixel SDK package clone.
I ran into another error but I already had dependencies of the package in the cmake file and the package.xml file through past experience with these courses like the Moveit course and checked it with the solution posted for that unit.
I ran into a different problem when I did the dependency of # include file such as the line below from the file dynamixel_hardware_interface.cpp; I think I had an issue with my cmake setup with including the include library setup. But I found a workaround by changing it
from this line: #include “dynamixel_hardware_interface/dynamixel_hardware_interface.hpp”
To this: It allowed to compile and execute the whole section without an issue. #include “dynamixel_hardware_interface.hpp”