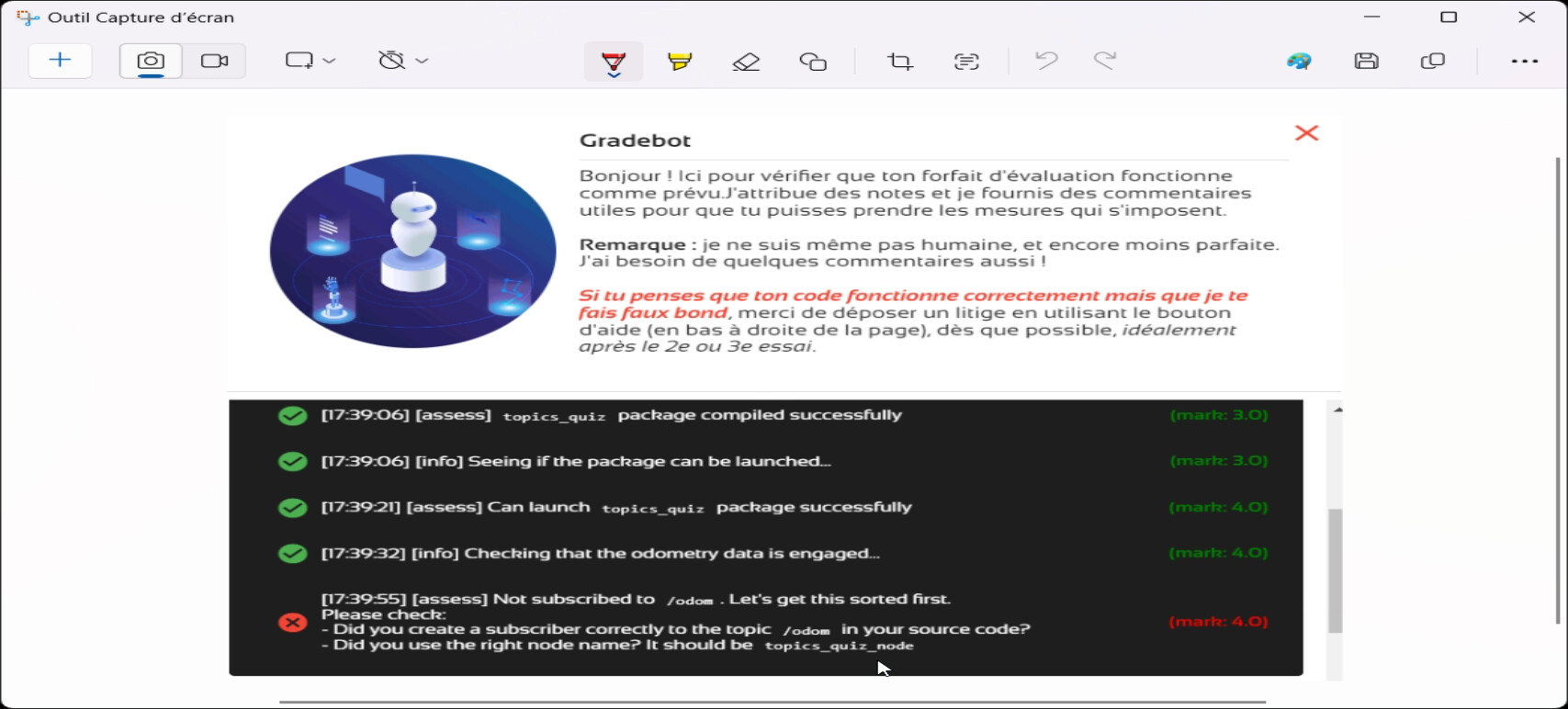
Gradebot show an error of non subscription for /odom topic but it's done in the code. When I did the second trial, Gradebot say that it was good and give me 8/10 notation. The simulation works very well.
This was not a gradebot mistake. It could be an error in our code or yours, but the gradebot is kinda perfect
That said, the first error here is that you should have contacted us after the 3rd trial max; now you have used up all 5 trials! I have assigned you two more trials; please use them judiciously.
The problem was that you introduced one or more errors in your code after the 2nd trial. You should re-test your code after every change to ensure it still works.
You should ensure you can launch this code for at least 30 seconds: it’s crashing with the following error:
ros2 launch topics_quiz topics_quiz.launch.py
Error:
[topics_quiz-1] Traceback (most recent call last):
[topics_quiz-1] File "/home/user/ros2_ws/install/topics_quiz/lib/topics_quiz/topics_quiz", line 33, in <module>
[topics_quiz-1] sys.exit(load_entry_point('topics-quiz==0.0.0', 'console_scripts', 'topics_quiz')())
[topics_quiz-1] File "/home/user/ros2_ws/install/topics_quiz/lib/python3.10/site-packages/topics_quiz/topics_quiz.py", line 145, in main
[topics_quiz-1] rclpy.spin(topics_quiz_node)
[topics_quiz-1] File "/opt/ros/humble/local/lib/python3.10/dist-packages/rclpy/__init__.py", line 222, in spin
[topics_quiz-1] executor.spin_once()
[topics_quiz-1] File "/opt/ros/humble/local/lib/python3.10/dist-packages/rclpy/executors.py", line 712, in spin_once
[topics_quiz-1] raise handler.exception()
[topics_quiz-1] File "/opt/ros/humble/local/lib/python3.10/dist-packages/rclpy/task.py", line 239, in __call__
[topics_quiz-1] self._handler.send(None)
[topics_quiz-1] File "/opt/ros/humble/local/lib/python3.10/dist-packages/rclpy/executors.py", line 418, in handler
[topics_quiz-1] await call_coroutine(entity, arg)
[topics_quiz-1] File "/opt/ros/humble/local/lib/python3.10/dist-packages/rclpy/executors.py", line 332, in _execute_timer
[topics_quiz-1] await await_or_execute(tmr.callback)
[topics_quiz-1] File "/opt/ros/humble/local/lib/python3.10/dist-packages/rclpy/executors.py", line 107, in await_or_execute
[topics_quiz-1] return callback(*args)
[topics_quiz-1] File "/home/user/ros2_ws/install/topics_quiz/lib/python3.10/site-packages/topics_quiz/topics_quiz.py", line 115, in motion
[topics_quiz-1] if self.laser_left < 5:
[topics_quiz-1] AttributeError: 'Topics_quiz' object has no attribute 'laser_left'