This is an error report.
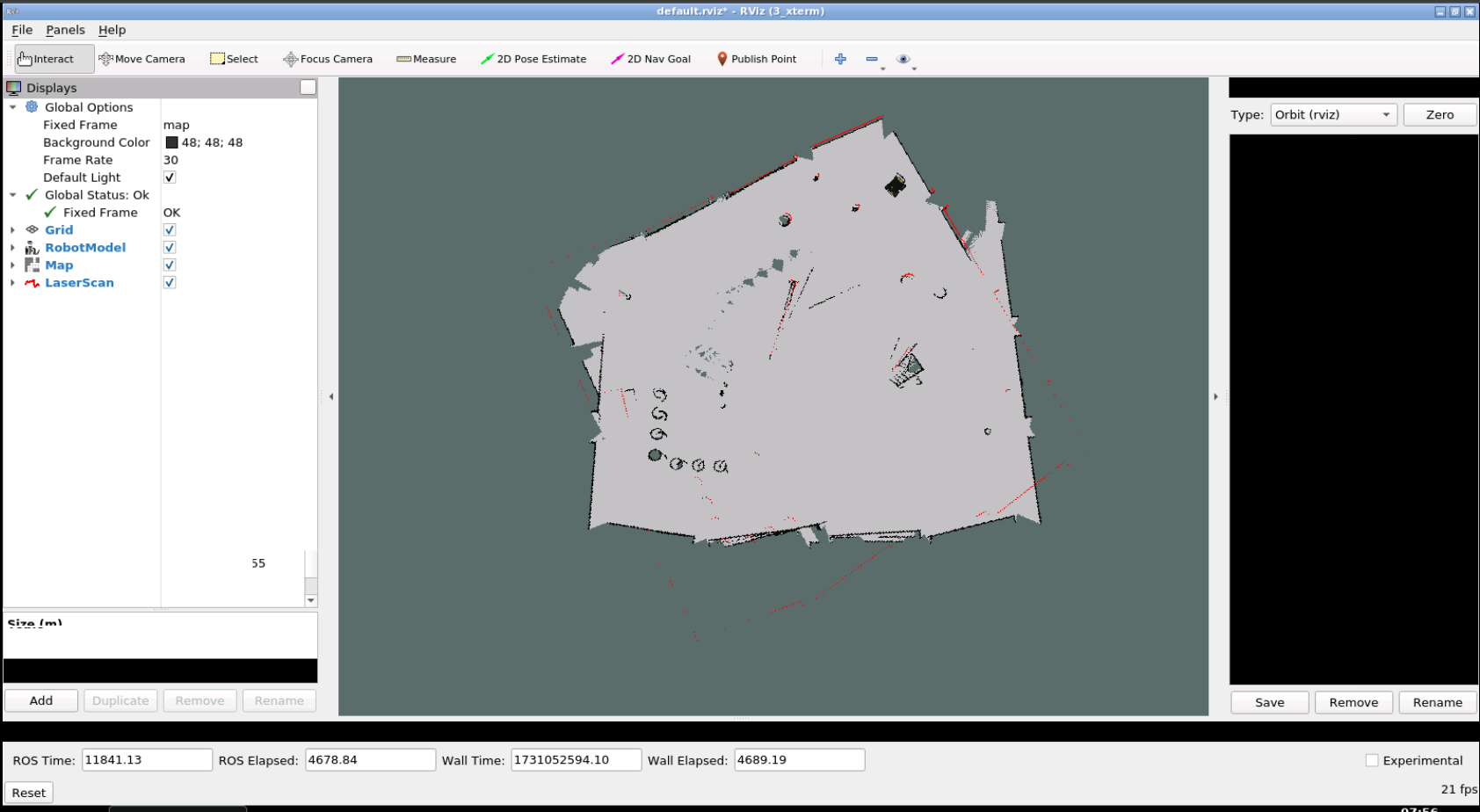
Screenshot of the error

Error details
When mapping, the robot or the sensor reading keeps shifting and creates a bad, distorted map
This is an error report.
Screenshot of the error
Error details
When mapping, the robot or the sensor reading keeps shifting and creates a bad, distorted map
This usually happens when there are problems with keeping track of the robot’s odometry.
Which simulation are you using? it might have an issue with gazebo’s differential drive plugin, which provides the odometry.
One quick thing you can try is making the robot go slowly while mapping, and try to avoid areas where the lidar rays will not return to to the robot, like an open space.
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.