Hi,
I am working in the finale project of "ROS manipulation in 5 days", and I tried to plan and execute trajectories but it says: Fail: ABORTED: No motion plan found. No execution attempted.
Please any ideas?
Help....
I appreciate your answer. I checked the arm kinematic chain twice… I think it is ok. Considering the yaml files, there are enough planning algorithms. The third point, I do not know, there is not a time out alert.
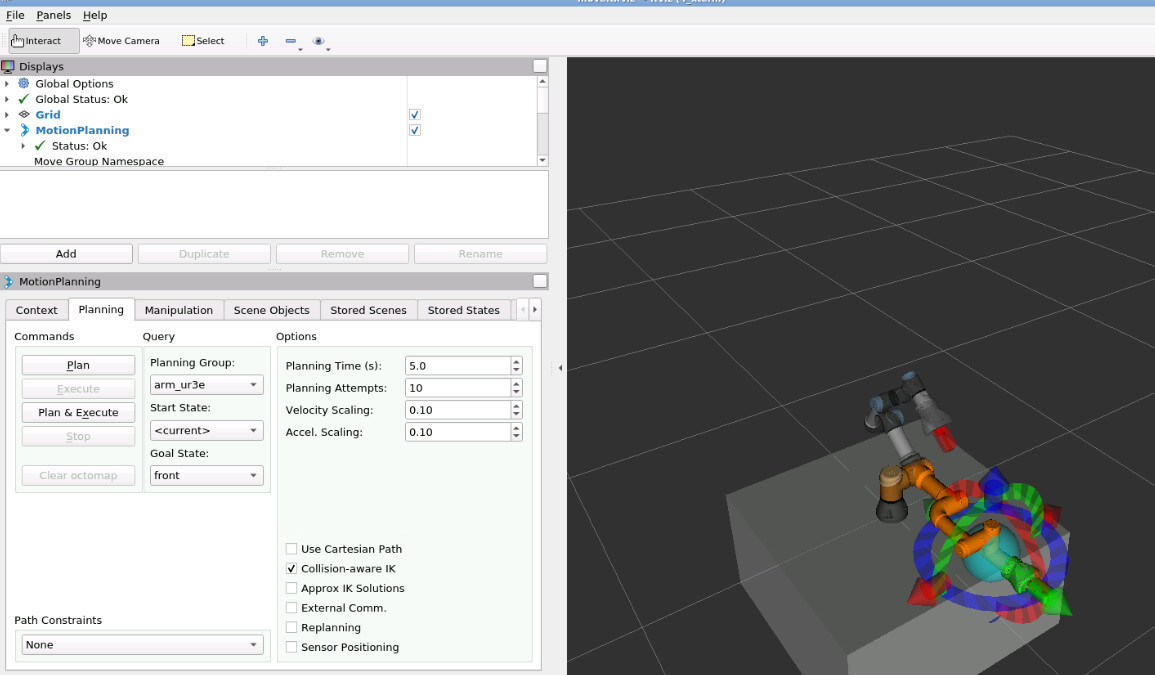
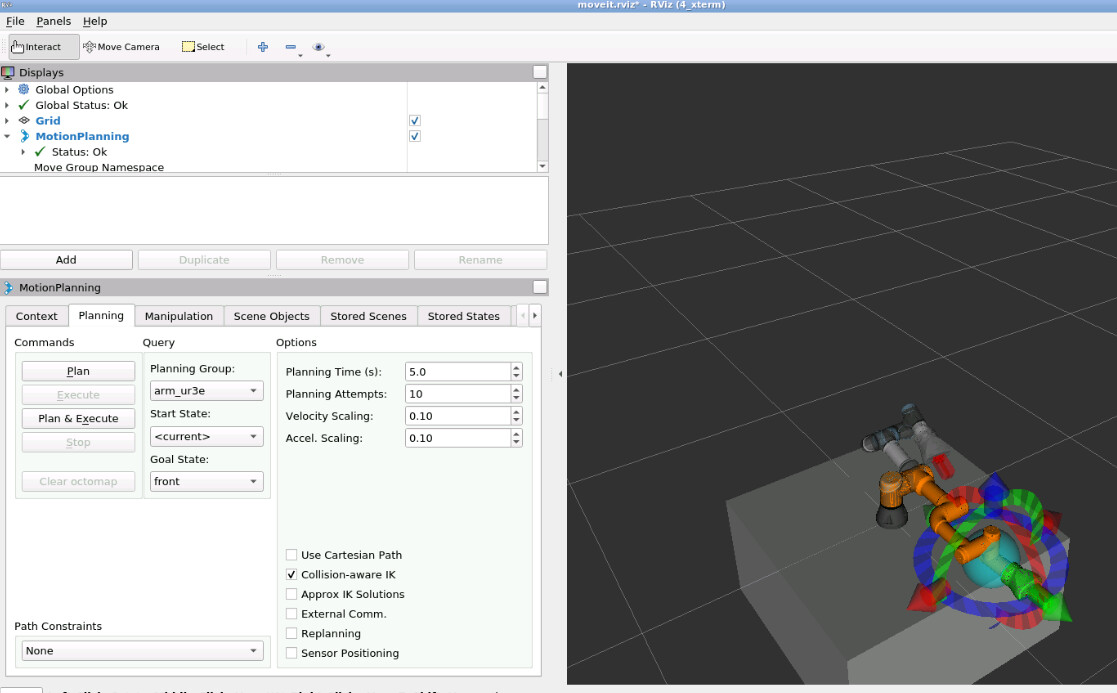
However, I attach two images of the demo.launch of moveit. Comparing both images, it can be appreciate a little jump in the robot state, but this is not happening in the Gazebo simulation>
There was a problem with the robot configuration. The robot will not do any path planning with Kinematics. The robot should work with Cartesian movements using RViz.
I did not work on this further since I moved on with ROS2 Manipulation at that time.
This seems to be a configuration issue with the UR3e used in the simulation, since all other robots worked in the previous units of this course. That has been my thought.
I tried doing that and honestly gave up as at that time, I tried several things and exhausted my options. Maybe I did not try much or missed a very basic thing. Or there is something wrong with the robot configuration.
Anyways, you can try to find any issues with the Robot configuration, and let us know if you find anything misconfigured.
I know this answer may not help you much, but this I what I know so far.