This is an error report.
Screenshot of the error
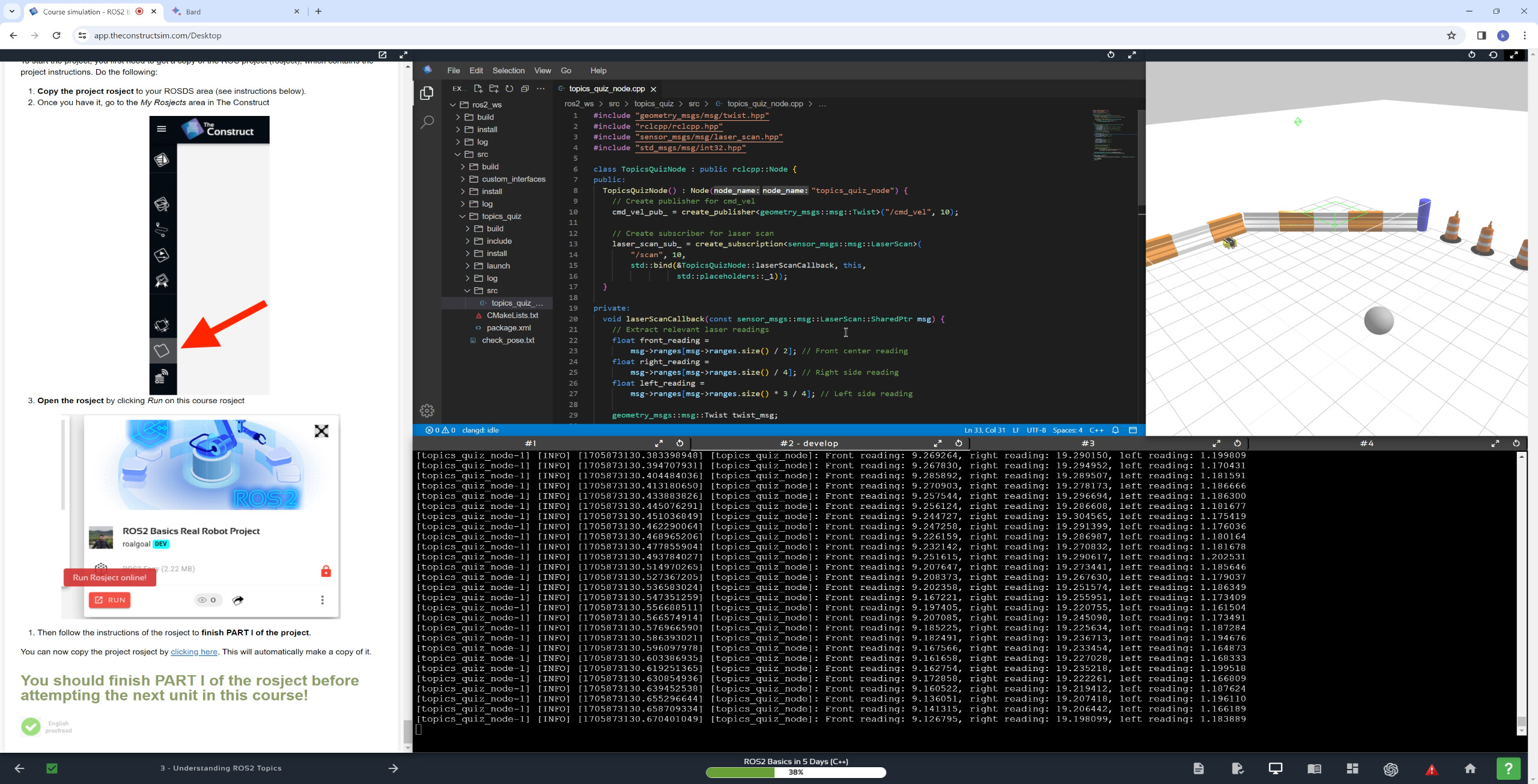
Error details
the grader indicated that my robot is NOT avoiding the obstacle . this is not the case. i am successfully avoiding obstacle.
This is an error report.
Screenshot of the error
Error details
the grader indicated that my robot is NOT avoiding the obstacle . this is not the case. i am successfully avoiding obstacle.
Hello @iskrishnas ,
You were using very high velocities in your program logic, especially for angular velocities (10 and 20 radiants/s). This was causing some unexpected scenarios in our autocorrection system, thus marking it as incorrect. If you reduce the velocities to something like this it should pass OK:
// Modified logic as per requirements:
if (front_reading > 1.0) {
twist_msg.linear.x = 0.25; // Move forward
} else if (front_reading < 1.0) {
twist_msg.angular.z = 0.5; // Turn roght
twist_msg.linear.x = 0.01; // stop
}
if (right_reading < 1.0) {
twist_msg.angular.z = -0.5; // Turn left
twist_msg.linear.x = 0.01; // stop
} else if (left_reading < 1.0) {
twist_msg.angular.z = 0.5; // Turn right
twist_msg.linear.x = 0.01; // stop
}
Hope this helps,
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.