This is an error report.
Screenshot of the error
Error details
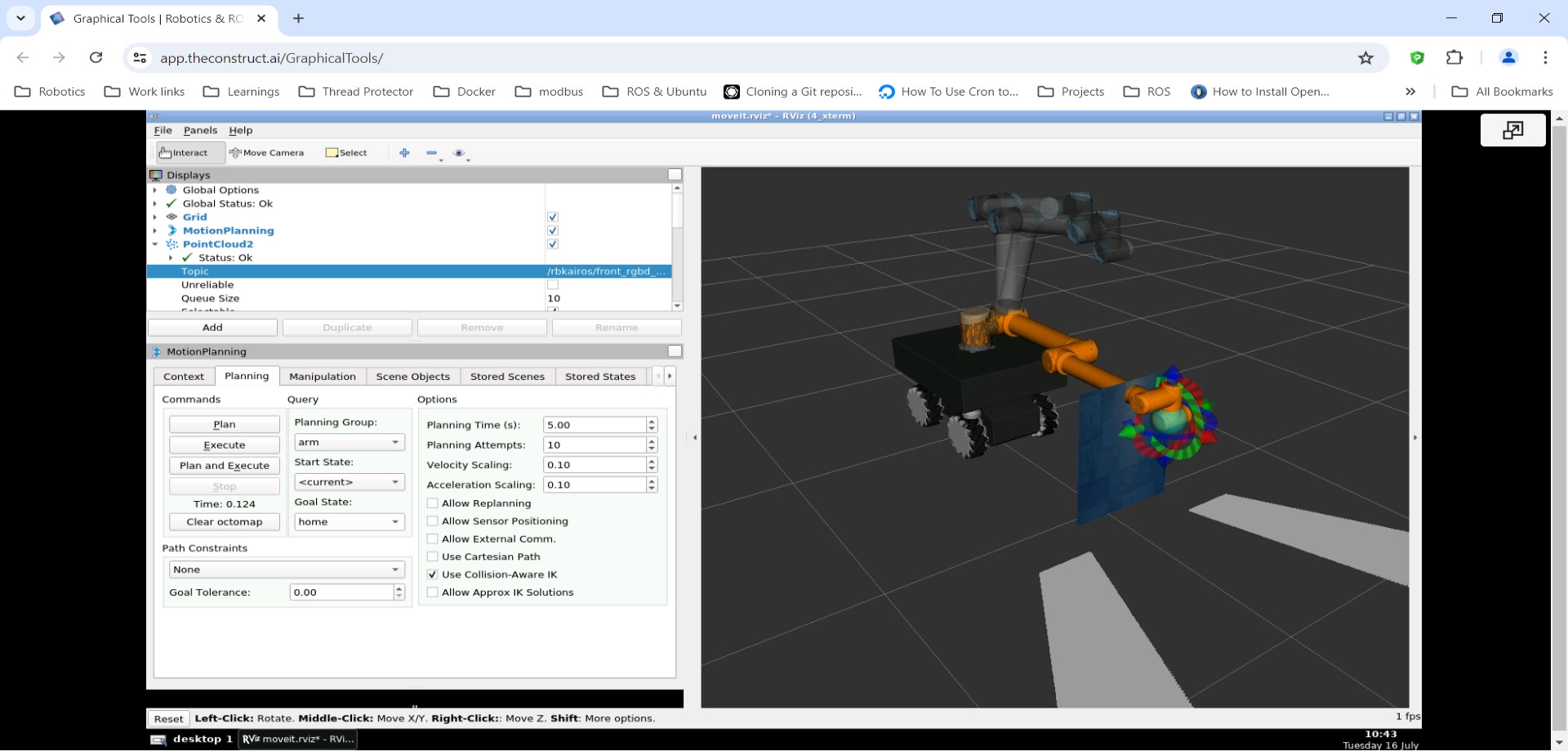
The point cloud visual not showing gradual color change and collision detection as per unit 4.3
This is an error report.
Screenshot of the error
Error details
The point cloud visual not showing gradual color change and collision detection as per unit 4.3
@themba.ramokoka
Let me get one of our experts to look into this for you.
Hi @themba.ramokoka ,
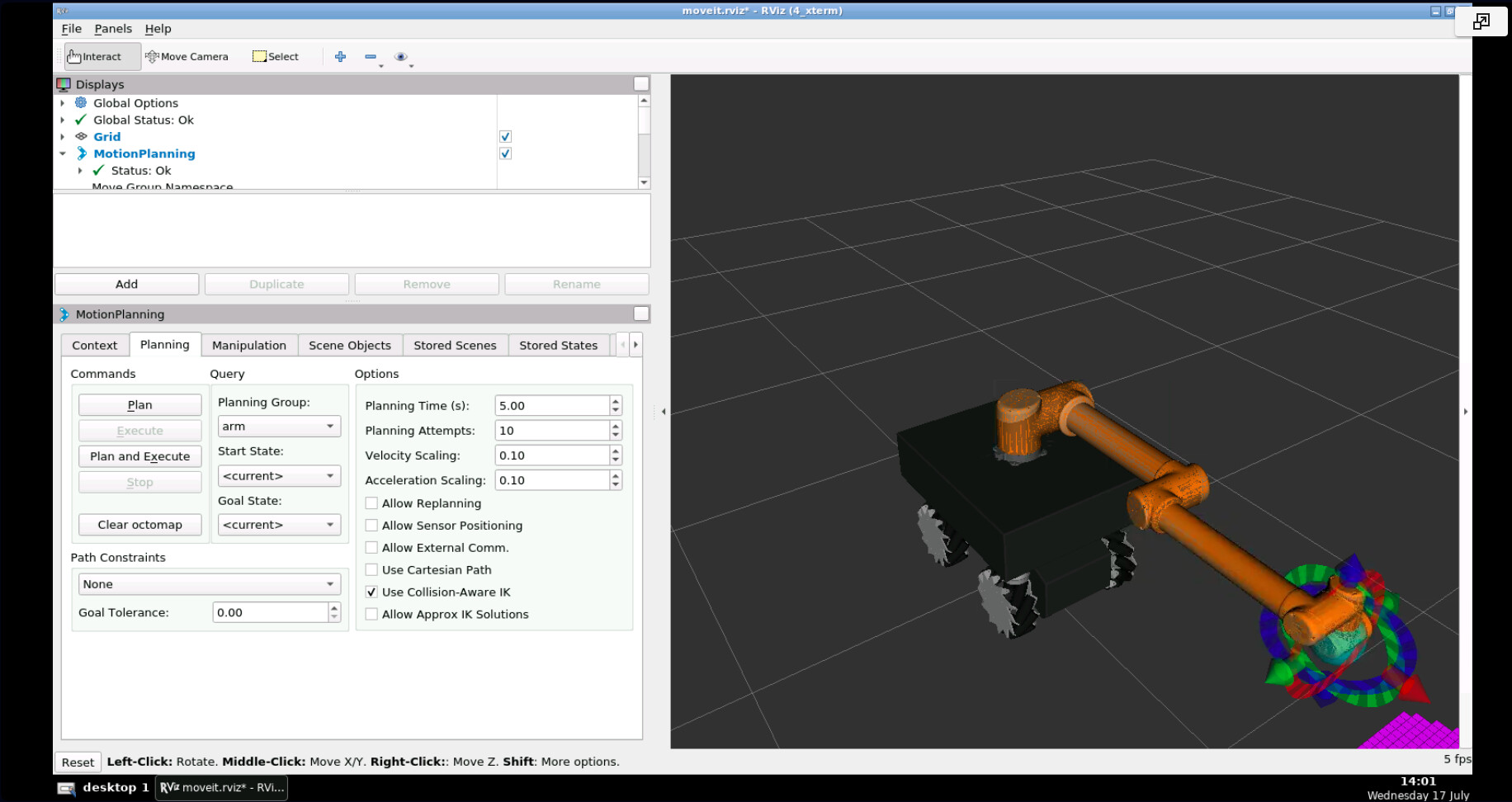
If you have configured Perception for the RB Kairos robot as per instructions in Chapter 3 in sub-section “Set Up Perception”, then when you launch the RB Kairos robot with the following command in Chapter 4, Sub-section 4.3, you should see RViz load up as shown in the first image below:
roslaunch rbkairos_moveit_config rbkairos_planning_execution.launch
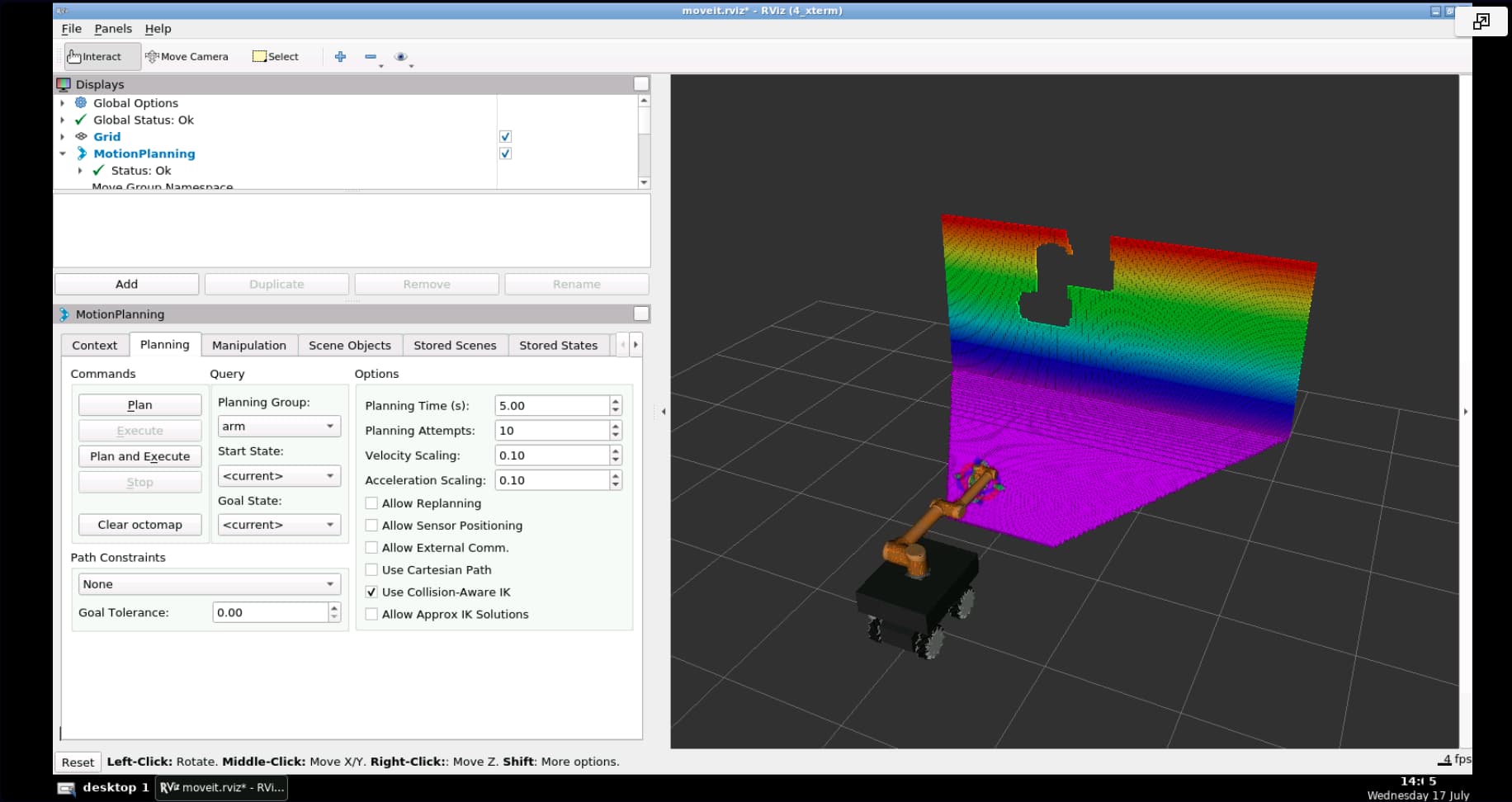
Then, if you rotate the view on RViz, you will see the colored pointcloud blocks on RViz, as shown in the below picture:
You will then be able to visualize the gradual color change in the pointclouds.
If you do not get the multi-colored pointcloud data, then the only issue you might be having is that you may have ignored / neglected the perception configuration step for the robot in the previous chapter or you may have configured it incorrectly. Please re-do the steps in the previous chapter to fix this issue. That should definitely solve your issue.
Let me know if you still have any issues after following the above steps.
Regards,
Girish
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.