This is an error report.
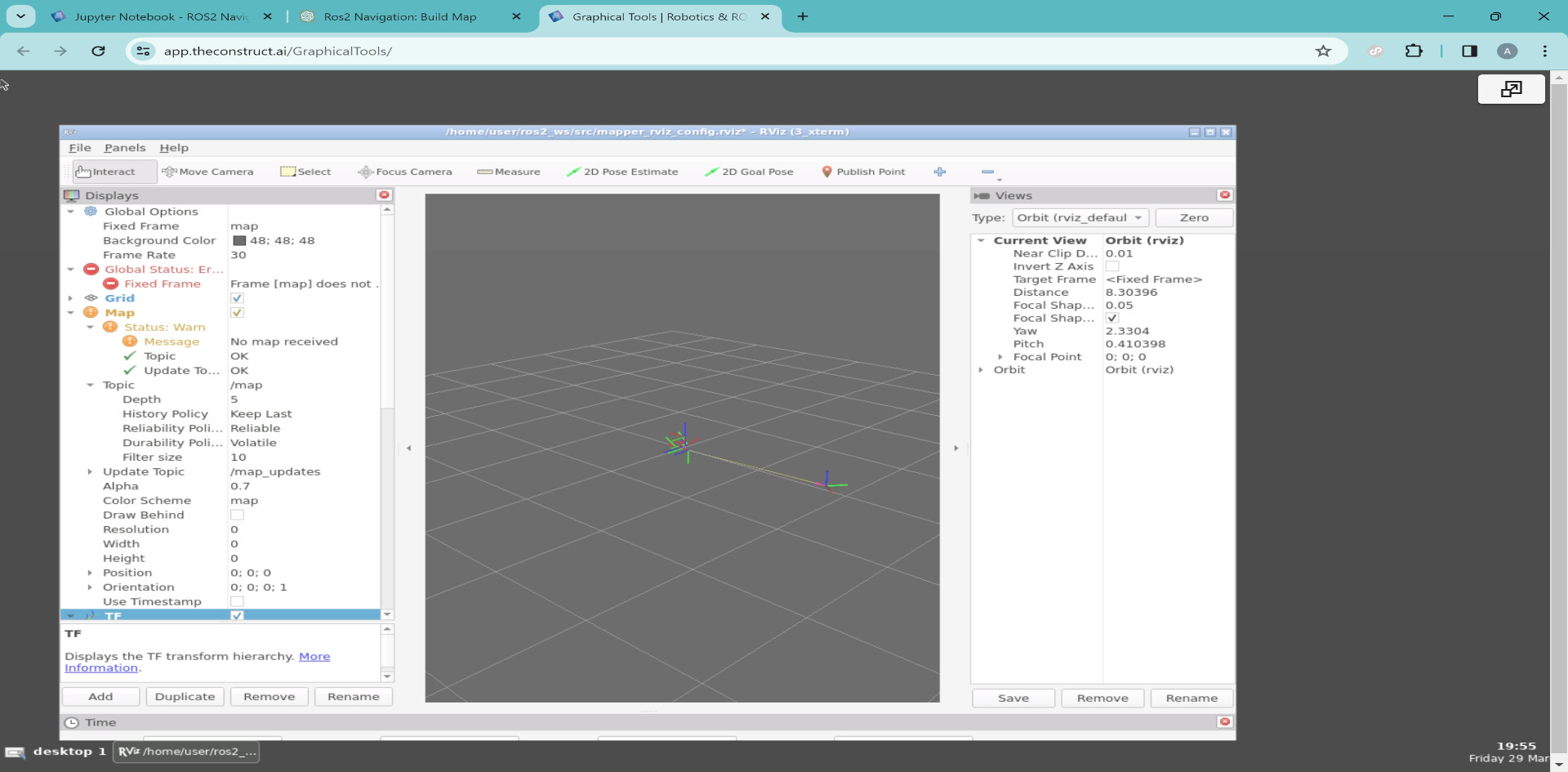
Screenshot of the error
Error details
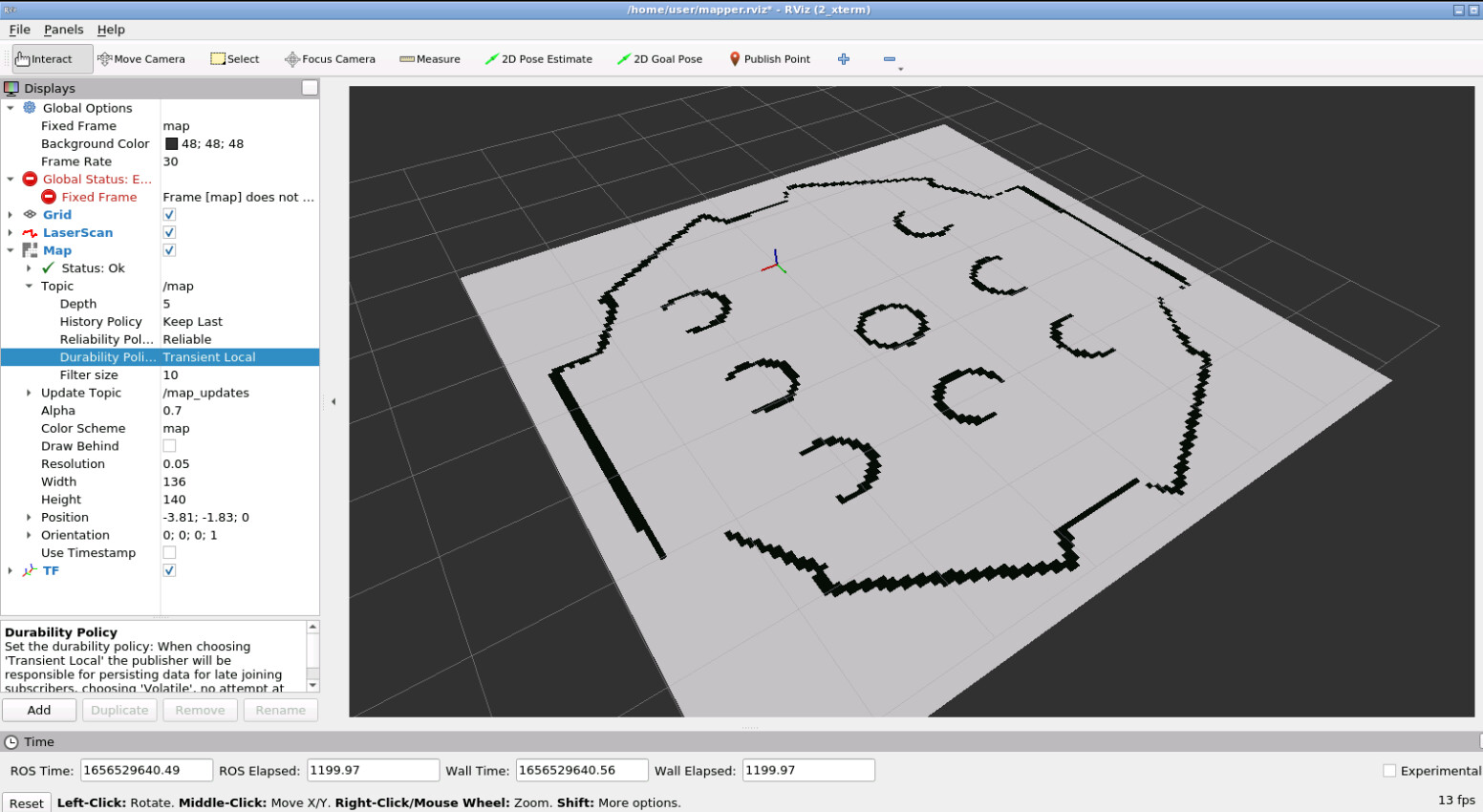
I am trying to get rviz to load the map I saved but it doesn't load the map, it says "No map received". I made sure my launch file has the .yaml file and its publishing but its not loading for some reason.
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
map_file = os.path.join(get_package_share_directory('map_server'), 'config', 'turtlebot_area.yaml')
return LaunchDescription([
Node(
package='nav2_map_server',
executable='map_server',
name='map_server',
output='screen',
parameters=[{'use_sim_time': True},
{'yaml_filename':map_file}
]),
Node(
package='nav2_lifecycle_manager',
executable='lifecycle_manager',
name='lifecycle_manager_mapper',
output='screen',
parameters=[{'use_sim_time': True},
{'autostart': True},
{'node_names': ['map_server']}])
])
from setuptools import find_packages, setup
import os
from glob import glob
package_name = 'map_server'
setup(
name=package_name,
version='0.0.0',
packages=find_packages(exclude=['test']),
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name, 'launch'), glob('launch/*.launch.py')),
(os.path.join('share', package_name, 'config'), glob('config/*')),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='user',
maintainer_email='user@todo.todo',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
],
},
)
Here is how my files are ordered. user:~/ros2_ws/src/map_server/config$ ls
turtlebot_area.pgm turtlebot_area.yaml