Hi
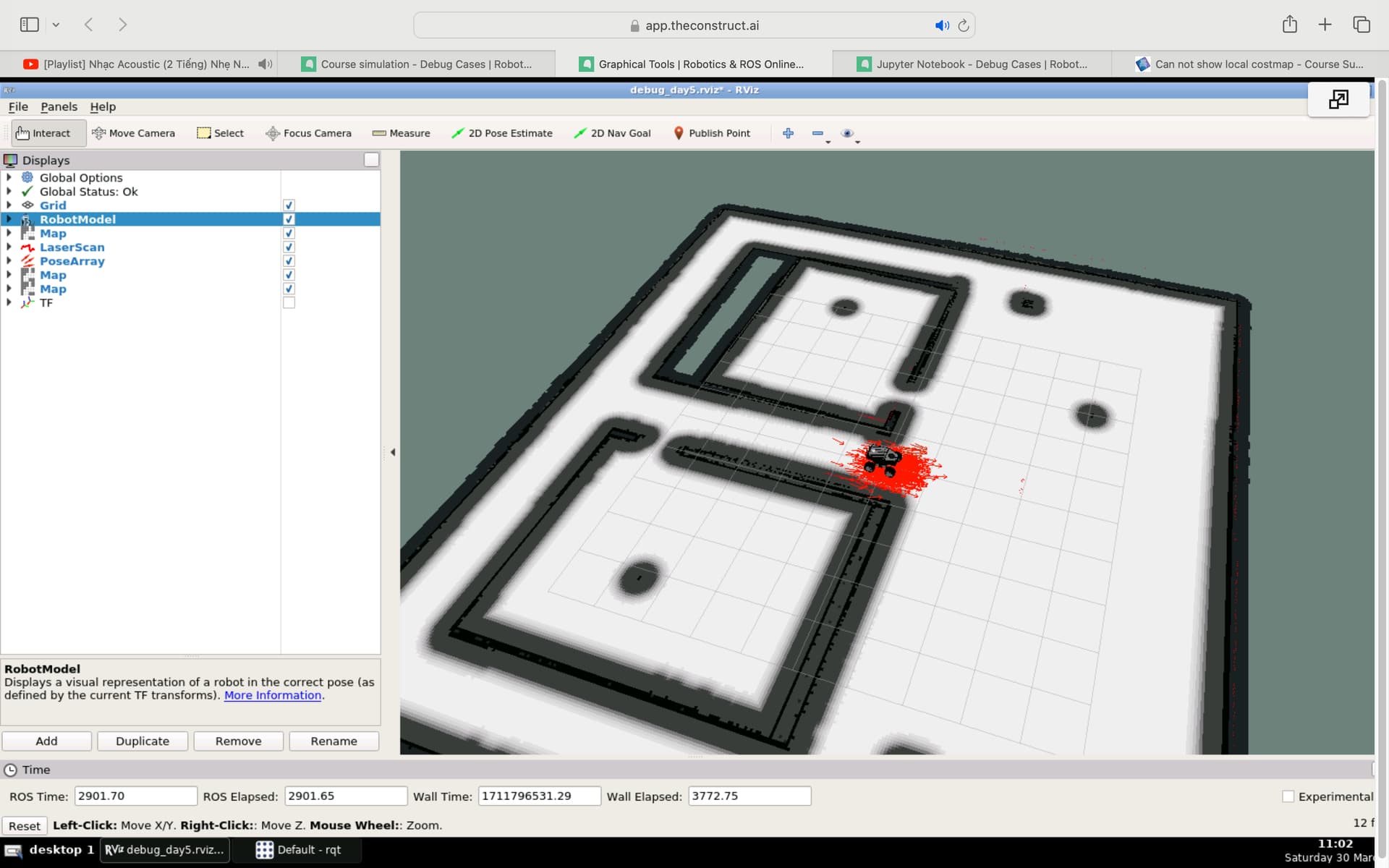
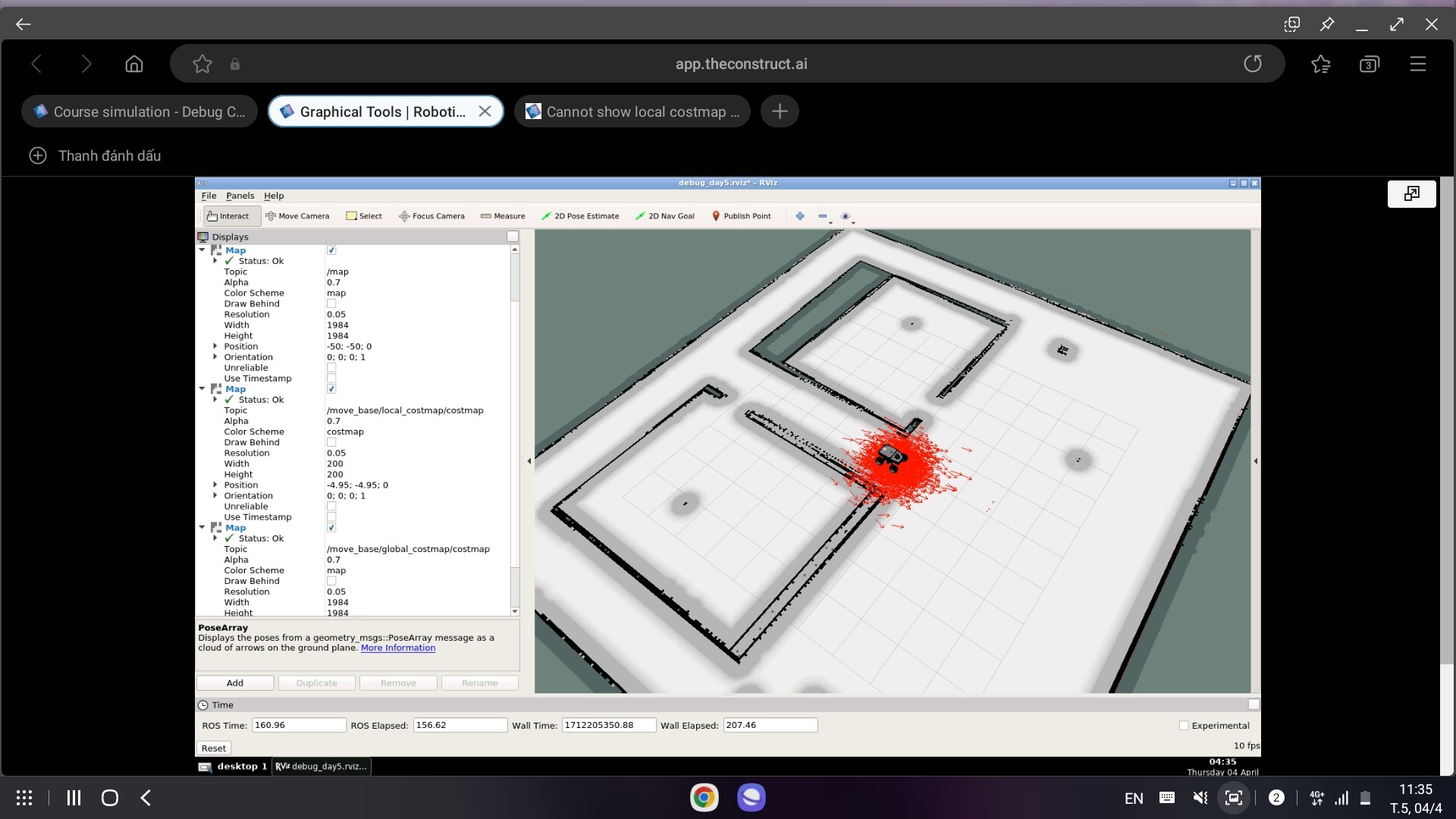
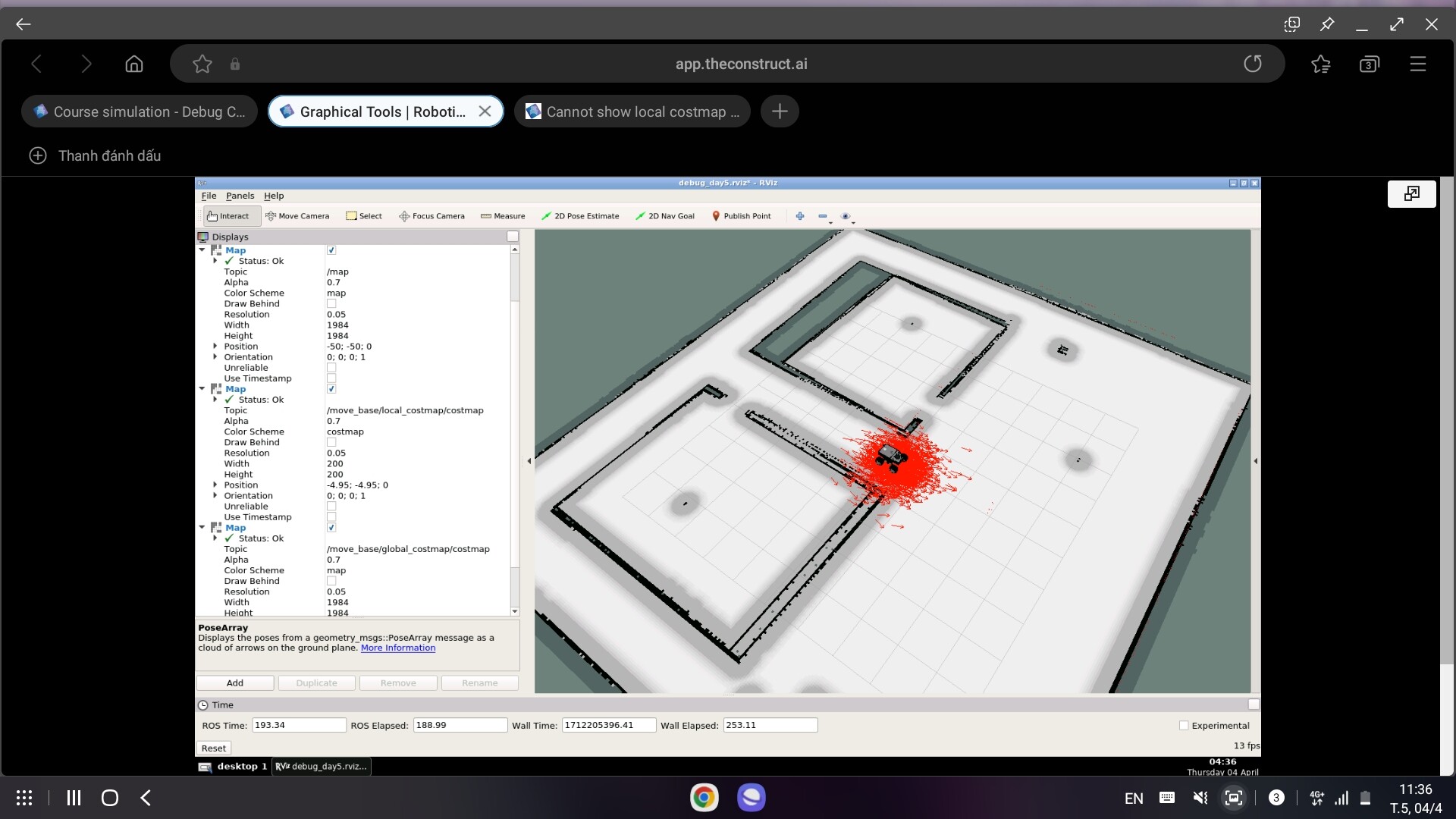
I followed the guide but I can not show local cost map on the rviz?
Help me, please?
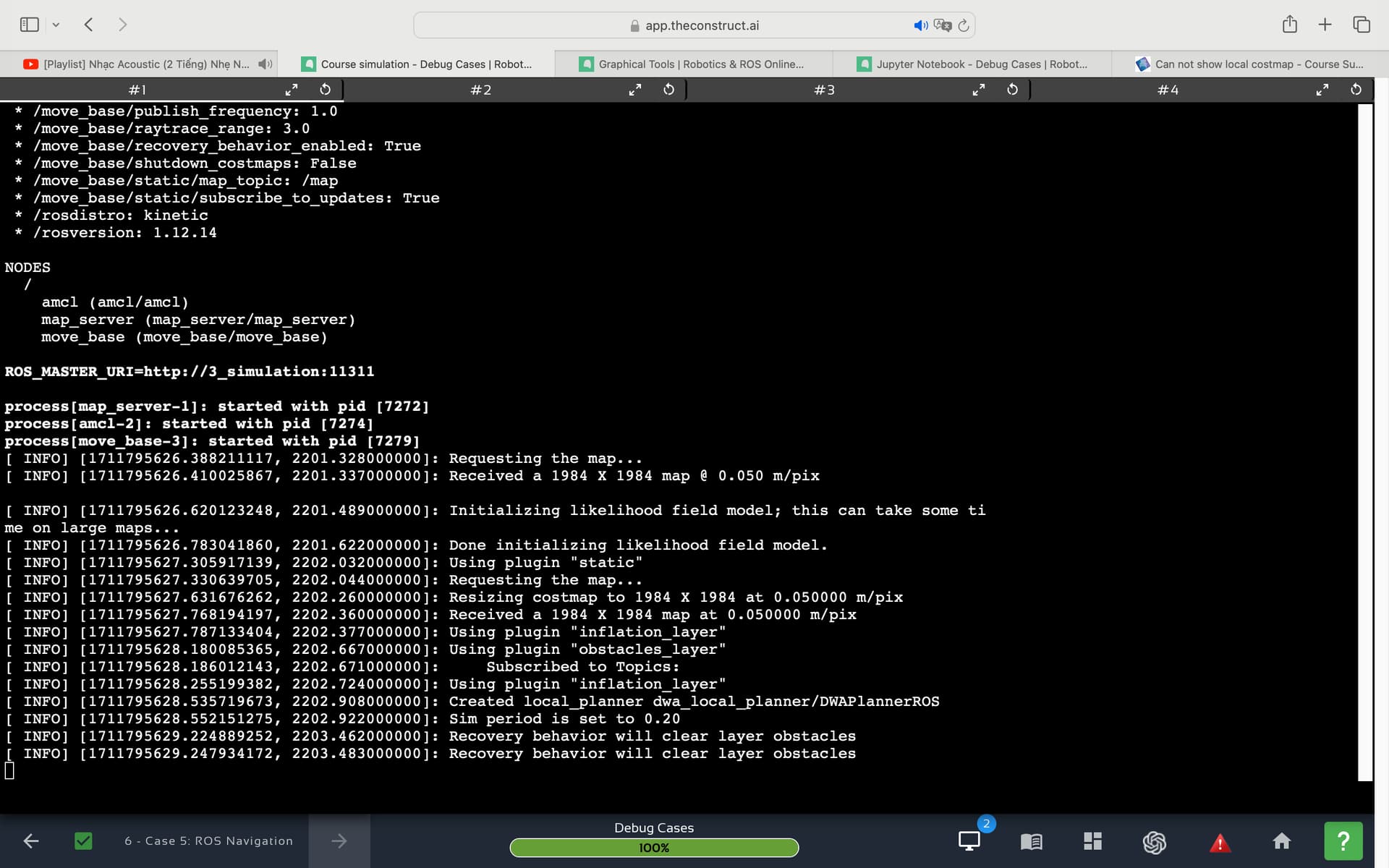
move_base.launch
<!-- Run move_base -->
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find my_summit_path_planning)/config/move_base_params.yaml" command="load" />
<rosparam file="$(find my_summit_path_planning)/config/costmap_common_params.yaml" command="load" />
<rosparam file="$(find my_summit_path_planning)/config/costmap_common_params.yaml" command="load" />
<rosparam file="$(find my_summit_path_planning)/config/local_costmap_params.yaml" command="load" />
<param name="local_costmap/width" value="10.0"/>
<param name="local_costmap/height" value="10.0"/>
<rosparam file="$(find my_summit_path_planning)/config/global_costmap_params_map.yaml" command="load" />
<rosparam file="$(find my_summit_path_planning)/config/dwa_local_planner_params.yaml" command="load" />
<rosparam file="$(find my_summit_path_planning)/config/global_planner_params.yaml" command="load" />
<param name="base_global_planner" value="navfn/NavfnROS" />
<param name="base_local_planner" value="dwa_local_planner/DWAPlannerROS" />
<param name="controller_frequency" value="5.0" />
<param name="controller_patience" value="15.0" />
</node>
costmap_common_params.yaml
obstacle_range: 2.5
raytrace_range: 3.0footprint: [[0.35, -0.3], [0.35, 0.3], [-0.35,0.3], [-0.35, -0.3]]
publish_frequency: 1.0
inflation_layer:
inflation_radius: 0.5obstacle_layer:
observation_sources: hokuyo_laser
hokuyo_laser: {sensor_frame: summit_xl_a_front_laser_links, data_type: LaserScan, topic: /hokuyo_base/scan, marking: true, clearing: true}static:
map_topic: /map
subscribe_to_updates: true
global_costmap_params_map.yaml
global_costmap:
global_frame: map
robot_base_frame: summit_xl_a_base_footprint
update_frequency: 5.0
static_map: trueplugins: - {name: static, type: "costmap_2d::StaticLayer"} - {name: inflation_layer, type: "costmap_2d::InflationLayer"}
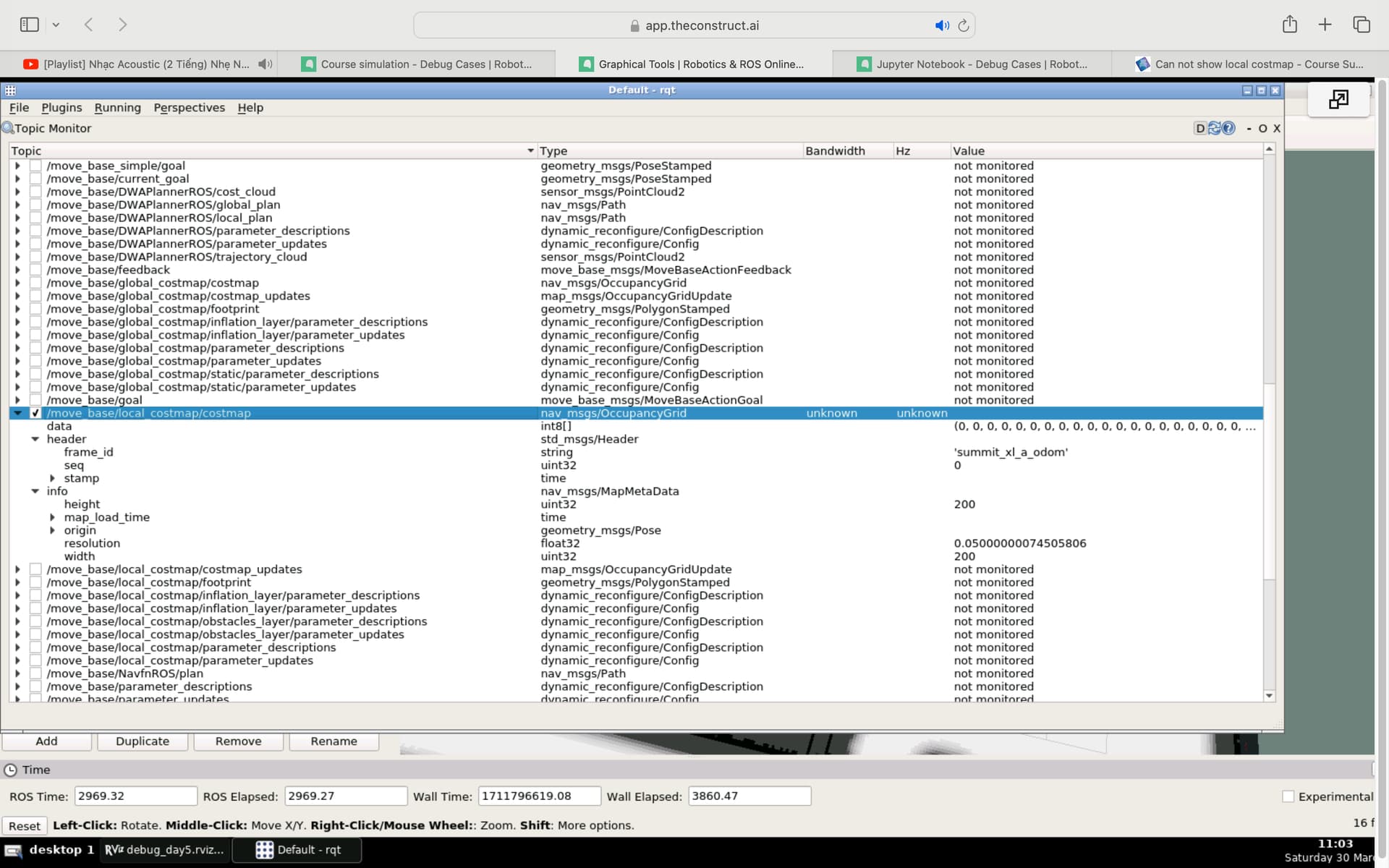
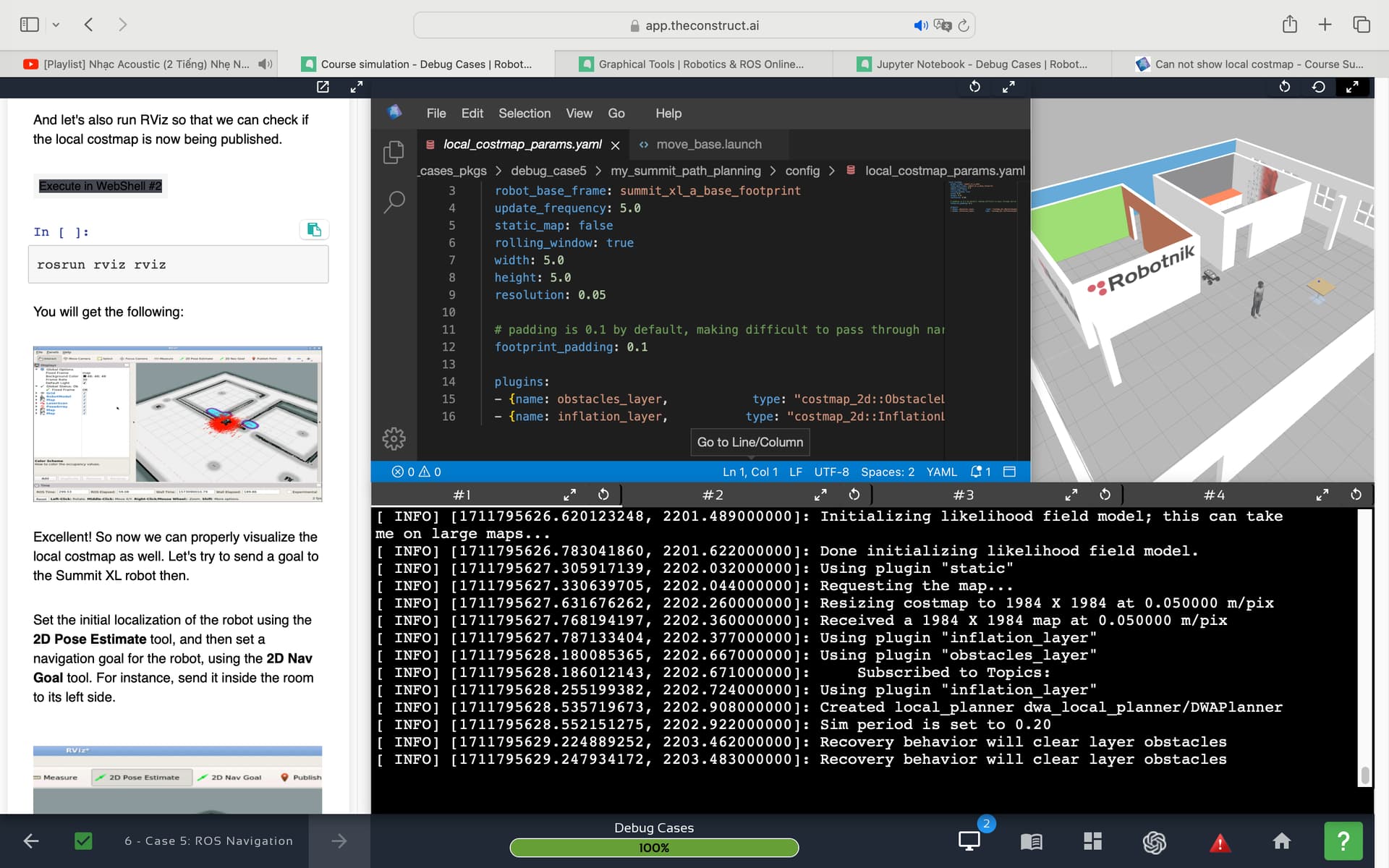
local_costmap_params.yaml
local_costmap:
global_frame: summit_xl_a_odom
robot_base_frame: summit_xl_a_base_footprint
update_frequency: 5.0
static_map: false
rolling_window: true
width: 5.0
height: 5.0
resolution: 0.05padding is 0.1 by default, making difficult to pass through narrow places
footprint_padding: 0.0
plugins:
- {name: obstacles_layer, type: “costmap_2d::ObstacleLayer”}
- {name: inflation_layer, type: “costmap_2d::InflationLayer”}