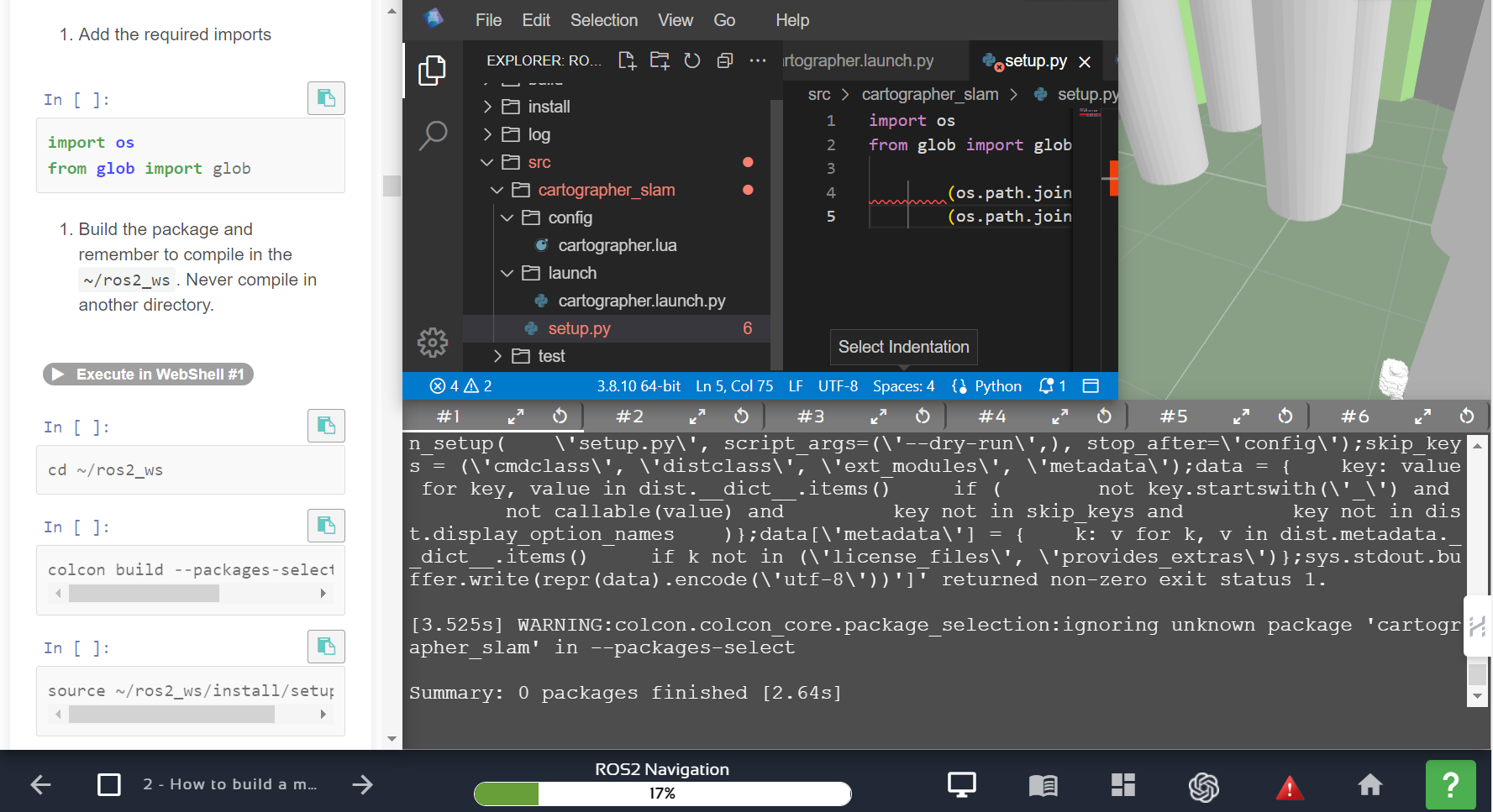
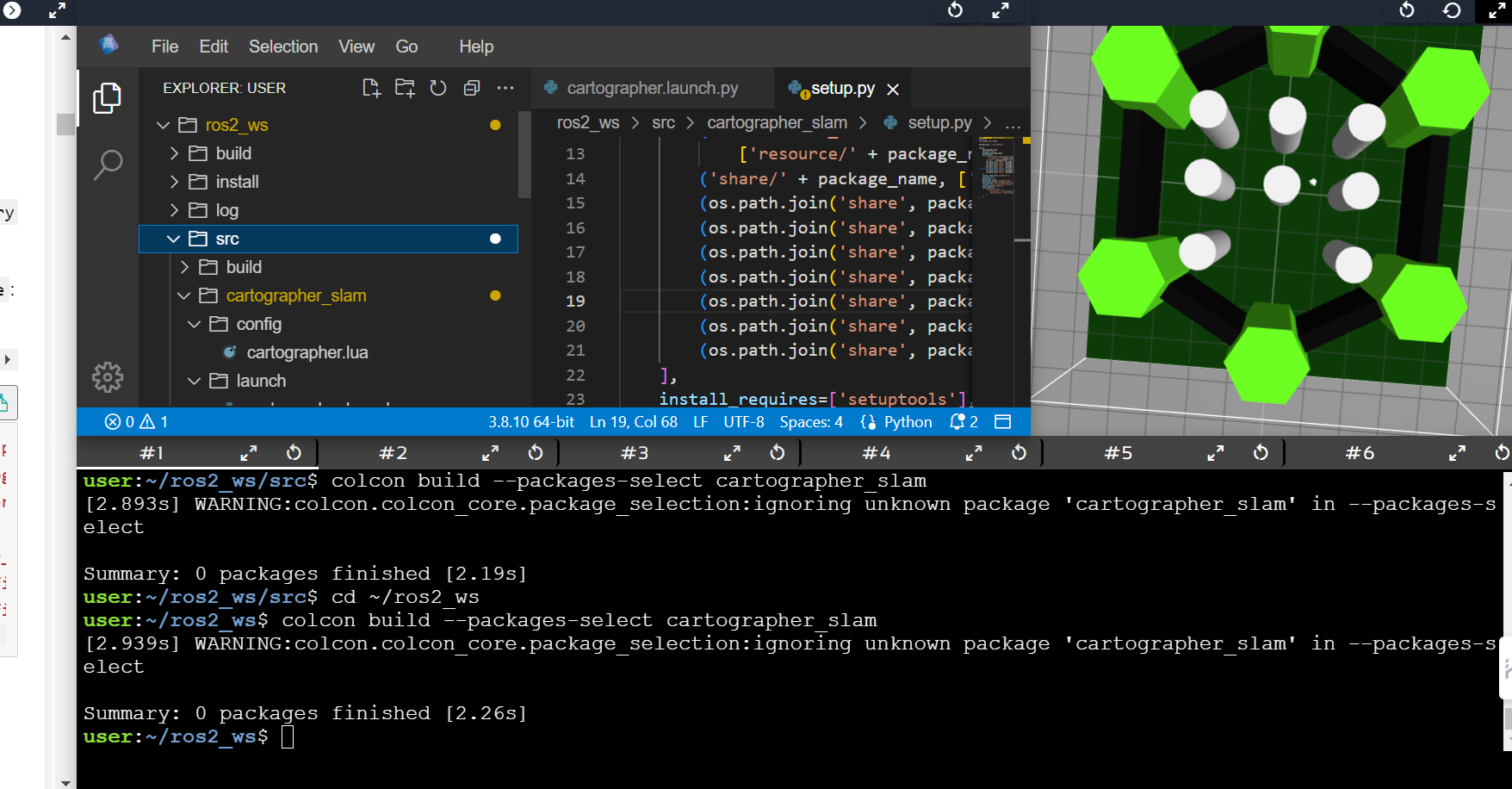
I get this error when I try to compile the cartographer_slam package
user:~/ros2_ws$ colcon build --packages-select cartographer_slam
Traceback (most recent call last):
File “”, line 1, in
File “/usr/lib/python3.10/distutils/core.py”, line 215, in run_setup
exec(f.read(), g)
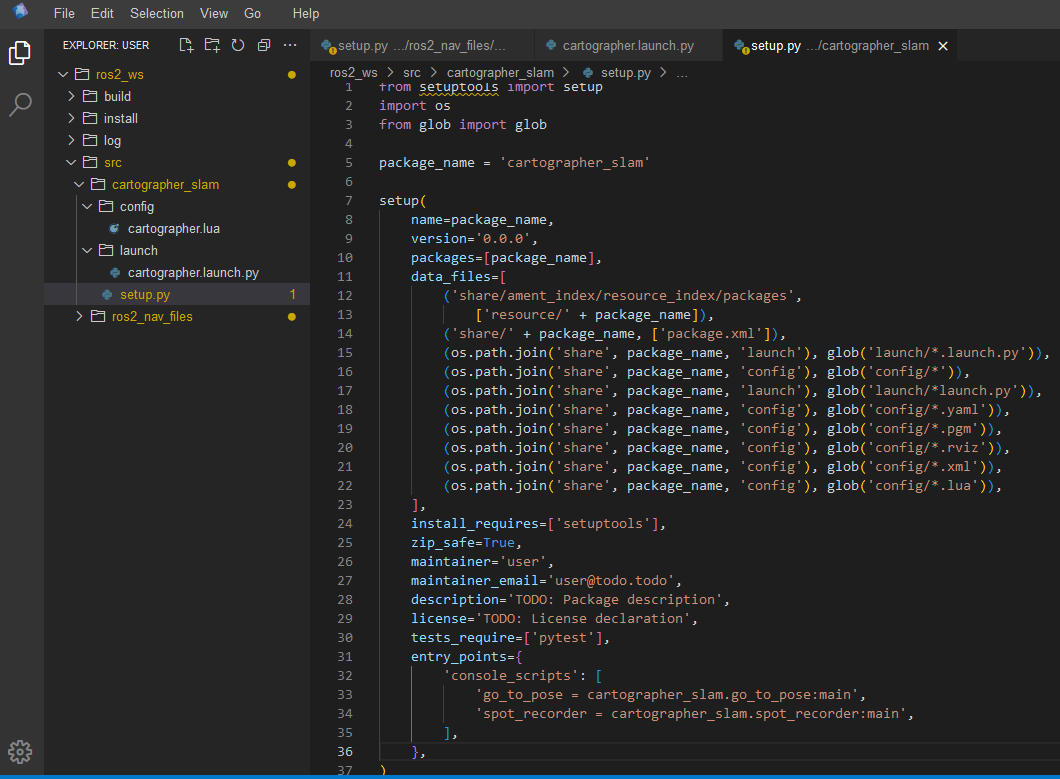
File “”, line 4
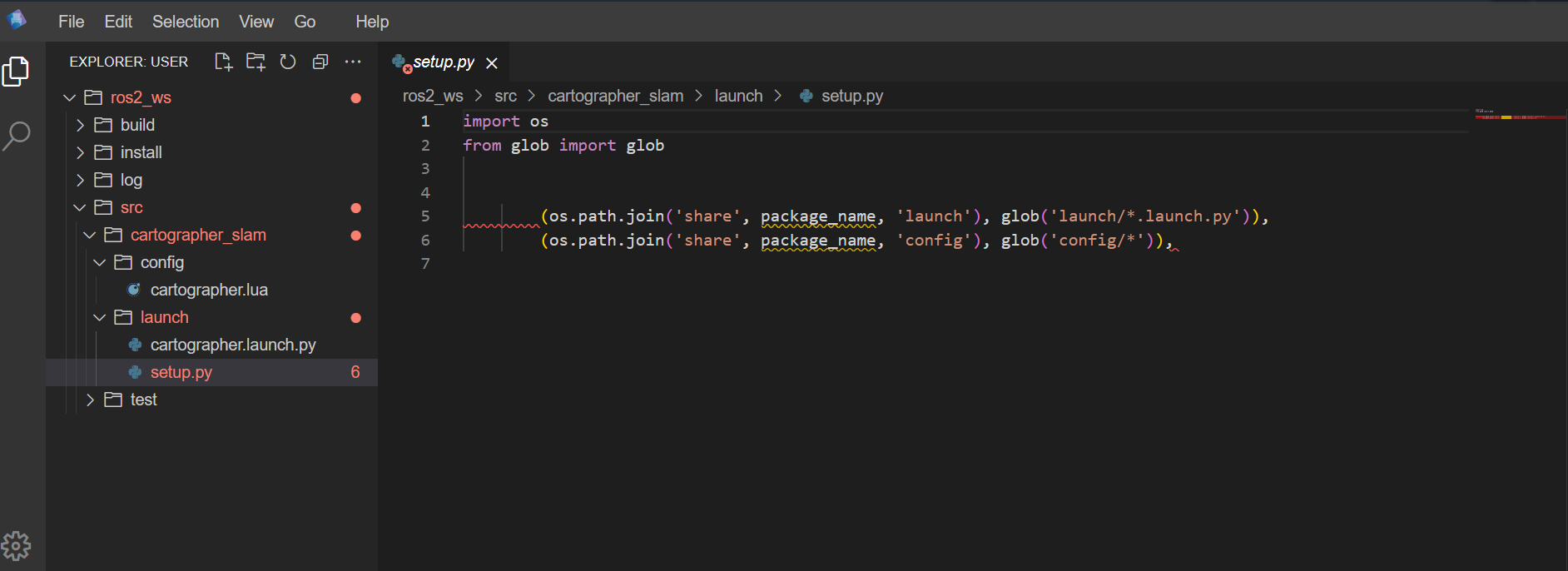
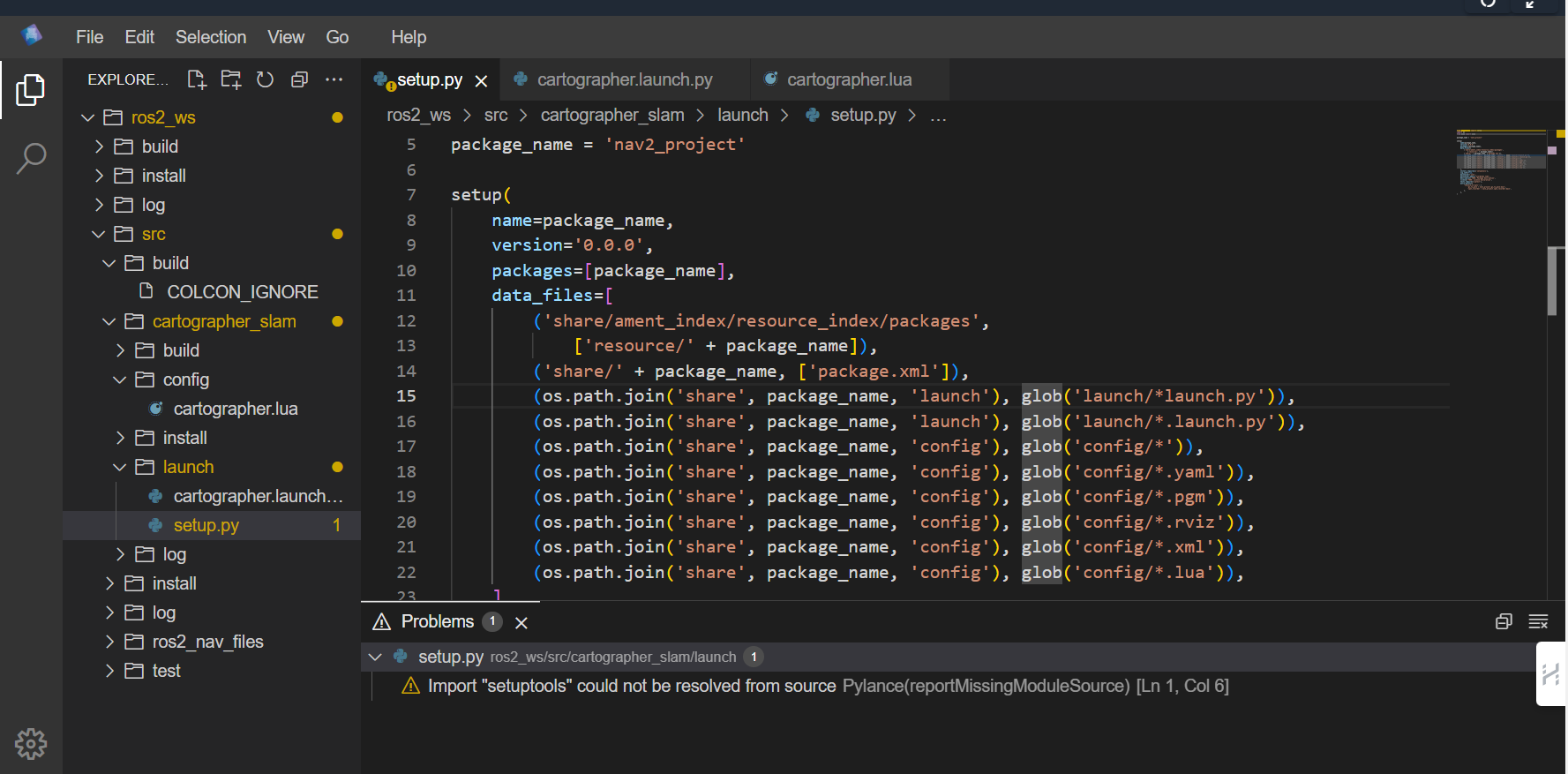
(os.path.join(‘share’, package_name, ‘launch’), glob(‘launch/*.launch.py’)),
IndentationError: unexpected indent
[2.708s] ERROR:colcon.colcon_core.package_identification:Exception in package identification extension ‘python_setup_py’ in ‘src/cartographer_slam’: Command ‘[’/usr/bin/python3’, ‘-c’, ‘import sys;from contextlib import suppress;exec(“with suppress(ImportError): from setuptools.extern.packaging.specifiers import SpecifierSet”);exec(“with suppress(ImportError): from packaging.specifiers import SpecifierSet”);from distutils.core import run_setup;dist = run_setup( 'setup.py', script_args=('–dry-run',),stop_after='config');skip_keys = ('cmdclass', 'distclass', 'ext_modules', 'metadata');data = { key: value for key, value in dist.dict.items() if ( not key.startswith('_') and not callable(value) and key not in skip_keys and key not in dist.display_option_names )};data['metadata'] = { k: v for k, v in dist.metadata.dict.items() if k not in ('license_files', 'provides_extras')};sys.stdout.buffer.write(repr(data).encode('utf-8'))’]’ returned non-zero exit status 1.
Traceback (most recent call last):
File “/usr/lib/python3/dist-packages/colcon_core/package_identification/init.py”, line 142, in _identify
retval = extension.identify(_reused_descriptor_instance)
File “/usr/lib/python3/dist-packages/colcon_python_setup_py/package_identification/python_setup_py.py”, line 48, in identify
config = get_setup_information(setup_py)
File “/usr/lib/python3/dist-packages/colcon_python_setup_py/package_identification/python_setup_py.py”, line 241, in get_setup_information
_setup_information_cache[hashable_env] = _get_setup_information(
File “/usr/lib/python3/dist-packages/colcon_python_setup_py/package_identification/python_setup_py.py”, line 288, in get_setup_information
result = subprocess.run(
File “/usr/lib/python3.10/subprocess.py”, line 526, in run
raise CalledProcessError(retcode, process.args,
subprocess.CalledProcessError: Command ‘[’/usr/bin/python3’, ‘-c’, 'import sys;from contextlib import suppress;exec(“with suppress(ImportError): from setuptools.extern.packaging.specifiers import SpecifierSet”);exec(“with suppress(ImportError): from packaging.specifiers import SpecifierSet”);from distutils.core import run_setup;dist = run_setup( 'setup.py', script_args=('–dry-run',), stop_after='config');skip_keys = ('cmdclass', 'distclass', 'ext_modules', 'metadata');data = { key: value for key, value in dist.dict.items() if ( not key.startswith('') and not callable(value) and key not in skip_keys and key not in dist.display_option_names )};data['metadata'] = { k: v for k, v in dist.metadata.dict.items() if k not in ('license_files', 'provides_extras')};sys.stdout.buffer.write(repr(data).encode('utf-8'))‘]’ returned non-zero exit status 1.
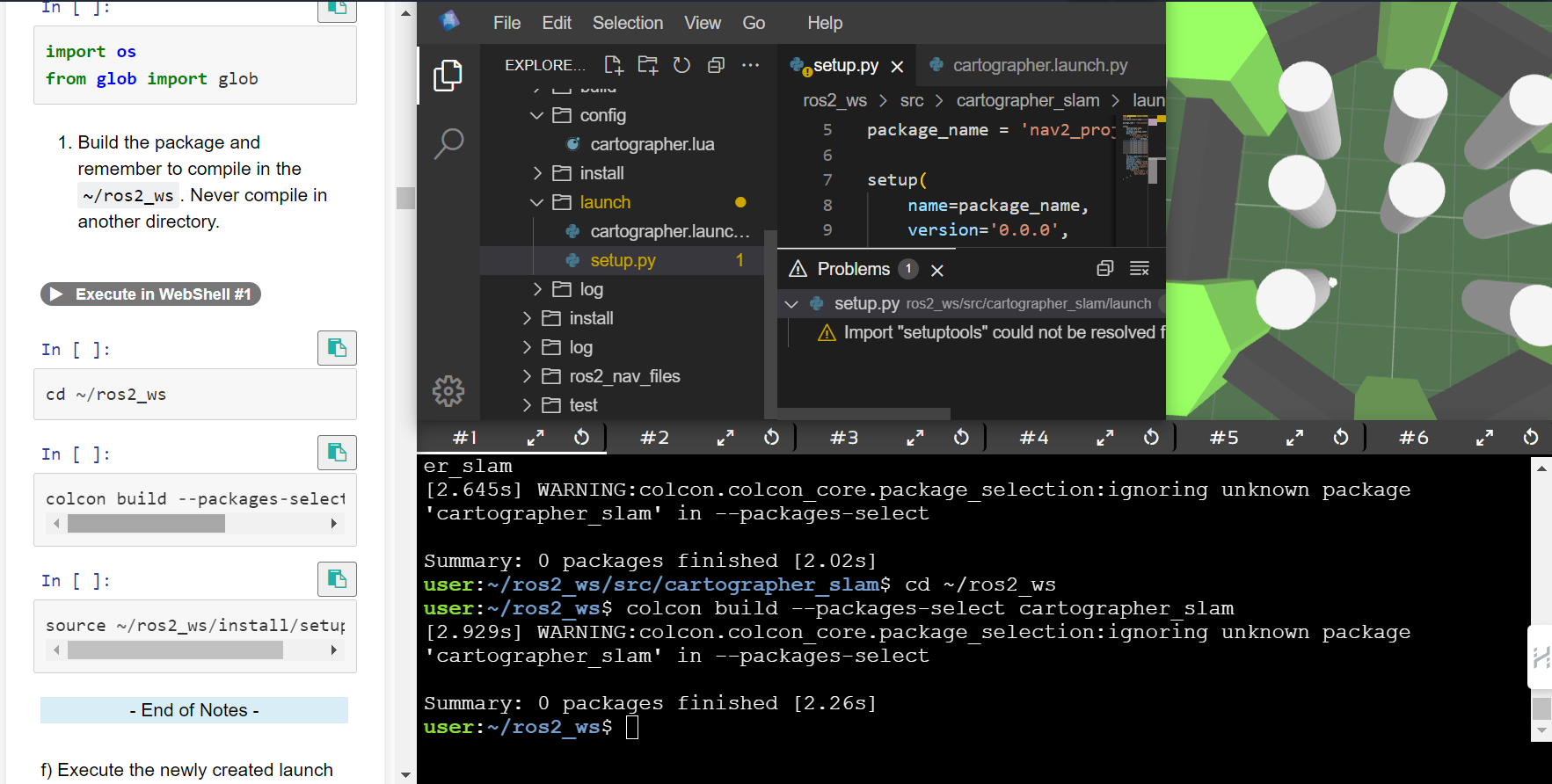
[2.738s] WARNING:colcon.colcon_core.package_selection:ignoring unknown package ‘cartographer_slam’ in --packages-select
Summary: 0 packages finished [2.14s]