hello I can’t fix the error of catkin_make. I am doing rosject of “ROS basics in 5 days” and when I do the catkin_make I get the following error:
“”"CMake Error at /home/user/catkin_ws/build/turtlebot3_move/cmake/turtlebot3_move-genmsg.cmake:3 (message):
Could not find messages which
‘/home/user/catkin_ws/devel/share/turtlebot3_move/msg/OdomRecordMsgAction.msg’
depends on. Did you forget to specify generate_messages(DEPENDENCIES …)?
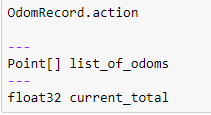
Cannot locate message [Point] in package [turtlebot3_move] with paths
[[’/home/user/catkin_ws/devel/share/turtlebot3_move/msg’]]
Call Stack (most recent call first):
/opt/ros/noetic/share/genmsg/cmake/genmsg-extras.cmake:307 (include)
turtlebot3_move/CMakeLists.txt:30 (generate_messages)
– Configuring incomplete, errors occurred!"""
following is CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(turtlebot3_move)
find_package(catkin REQUIRED COMPONENTS
rospy
actionlib_msgs
std_msgs
message_generation
)
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
## Generate services in the 'srv' folder
add_service_files(
FILES
MoveInSquare.srv
# Service1.srv
# Service2.srv
)
## Generate actions in the 'action' folder
add_action_files(
FILES
OdomRecordMsg.action
)
## Generate added messages and services with any dependencies listed here
generate_messages(
DEPENDENCIES
std_msgs
actionlib_msgs
)
catkin_package(
CATKIN_DEPENDS
rospy
message_runtime
actionlib_msgs
# DEPENDS system_lib
)
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
and this is my package.xml
<?xml version="1.0"?>
<package format="2">
<name>turtlebot3_move</name>
<version>0.0.0</version>
<description>The turtlebot3_move package</description>
<!-- One maintainer tag required, multiple allowed, one person per tag -->
<!-- Example: -->
<!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> -->
<maintainer email="user@todo.todo">user</maintainer>
<!-- One license tag required, multiple allowed, one license per tag -->
<!-- Commonly used license strings: -->
<!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 -->
<license>TODO</license>
<!-- Url tags are optional, but multiple are allowed, one per tag -->
<!-- Optional attribute type can be: website, bugtracker, or repository -->
<!-- Example: -->
<!-- <url type="website">http://wiki.ros.org/turtlebot3_move</url> -->
<!-- Author tags are optional, multiple are allowed, one per tag -->
<!-- Authors do not have to be maintainers, but could be -->
<!-- Example: -->
<!-- <author email="jane.doe@example.com">Jane Doe</author> -->
<!-- The *depend tags are used to specify dependencies -->
<!-- Dependencies can be catkin packages or system dependencies -->
<!-- Examples: -->
<!-- Use depend as a shortcut for packages that are both build and exec dependencies -->
<!-- <depend>roscpp</depend> -->
<!-- Note that this is equivalent to the following: -->
<!-- <build_depend>roscpp</build_depend> -->
<!-- <exec_depend>roscpp</exec_depend> -->
<!-- Use build_depend for packages you need at compile time: -->
<!-- <build_depend>message_generation</build_depend> -->
<!-- Use build_export_depend for packages you need in order to build against this package: -->
<!-- <build_export_depend>message_generation</build_export_depend> -->
<!-- Use buildtool_depend for build tool packages: -->
<!-- <buildtool_depend>catkin</buildtool_depend> -->
<!-- Use exec_depend for packages you need at runtime: -->
<!-- <exec_depend>message_runtime</exec_depend> -->
<!-- Use test_depend for packages you need only for testing: -->
<!-- <test_depend>gtest</test_depend> -->
<!-- Use doc_depend for packages you need only for building documentation: -->
<!-- <doc_depend>doxygen</doc_depend> -->
<buildtool_depend>catkin</buildtool_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<build_depend>message_generation</build_depend>
<build_export_depend>rospy</build_export_depend>
<exec_depend>rospy</exec_depend>
<build_export_depend>std_msgs</build_export_depend>
<exec_depend>std_msgs</exec_depend>
<build_export_depend>message_runtime</build_export_depend>
<exec_depend>message_runtime</exec_depend>
<build_depend>actionlib</build_depend>
<build_depend>actionlib_msgs</build_depend>
<build_export_depend>actionlib</build_export_depend>
<build_export_depend>actionlib_msgs</build_export_depend>
<exec_depend>actionlib</exec_depend>
<exec_depend>actionlib_msgs</exec_depend>
<!-- The export tag contains other, unspecified, tags -->
<export>
<!-- Other tools can request additional information be placed here -->
</export>
</package>
 :
:
 many thanks for your reply
many thanks for your reply