Hi, I connected to real robot lab for the first time and things were not working as expected. I would like to know if I forgot to initialize something, despite having followed the steps in the video tutorial. Here were my main problems:
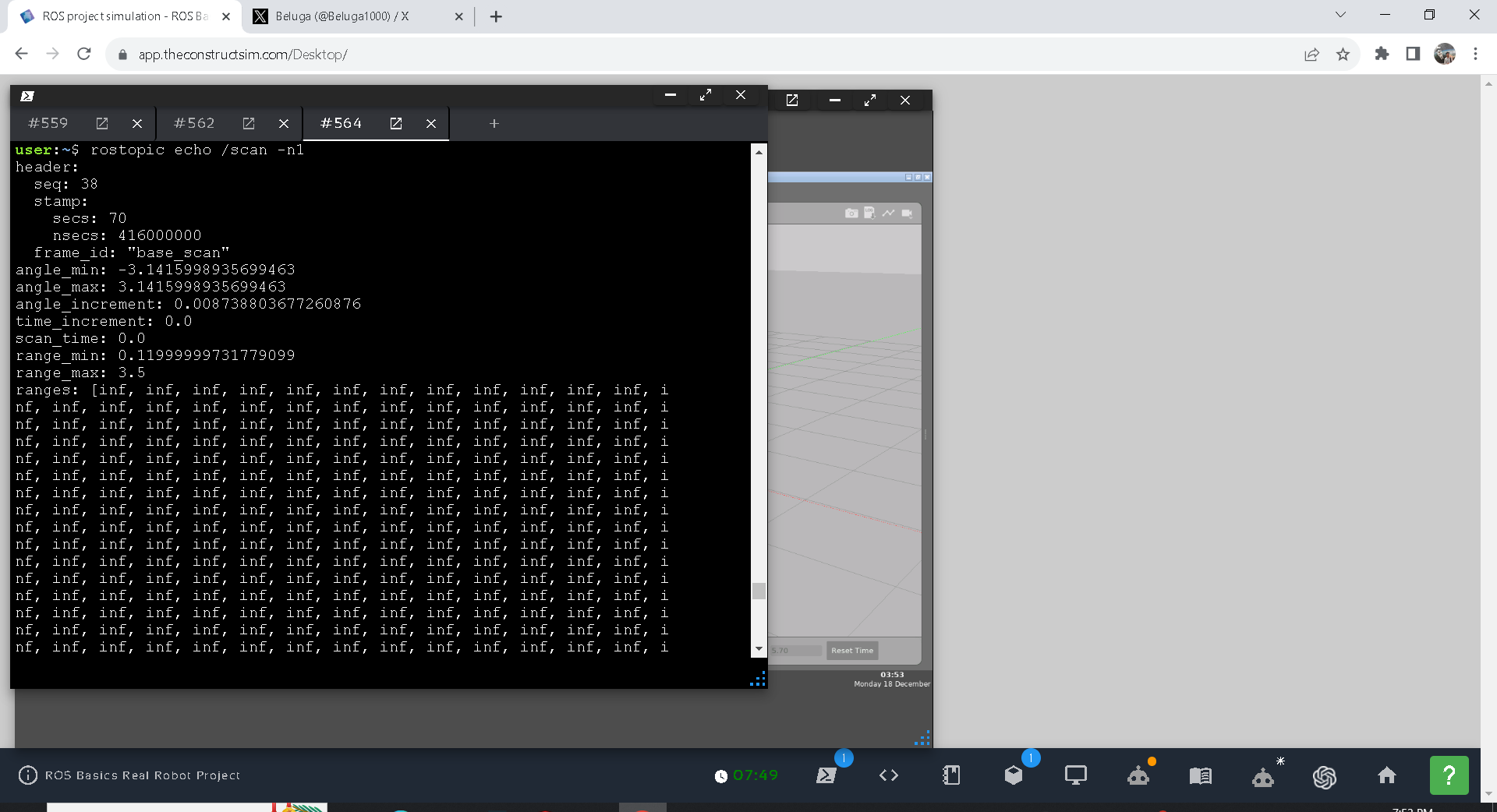
rostopic echo /scan showed nothing
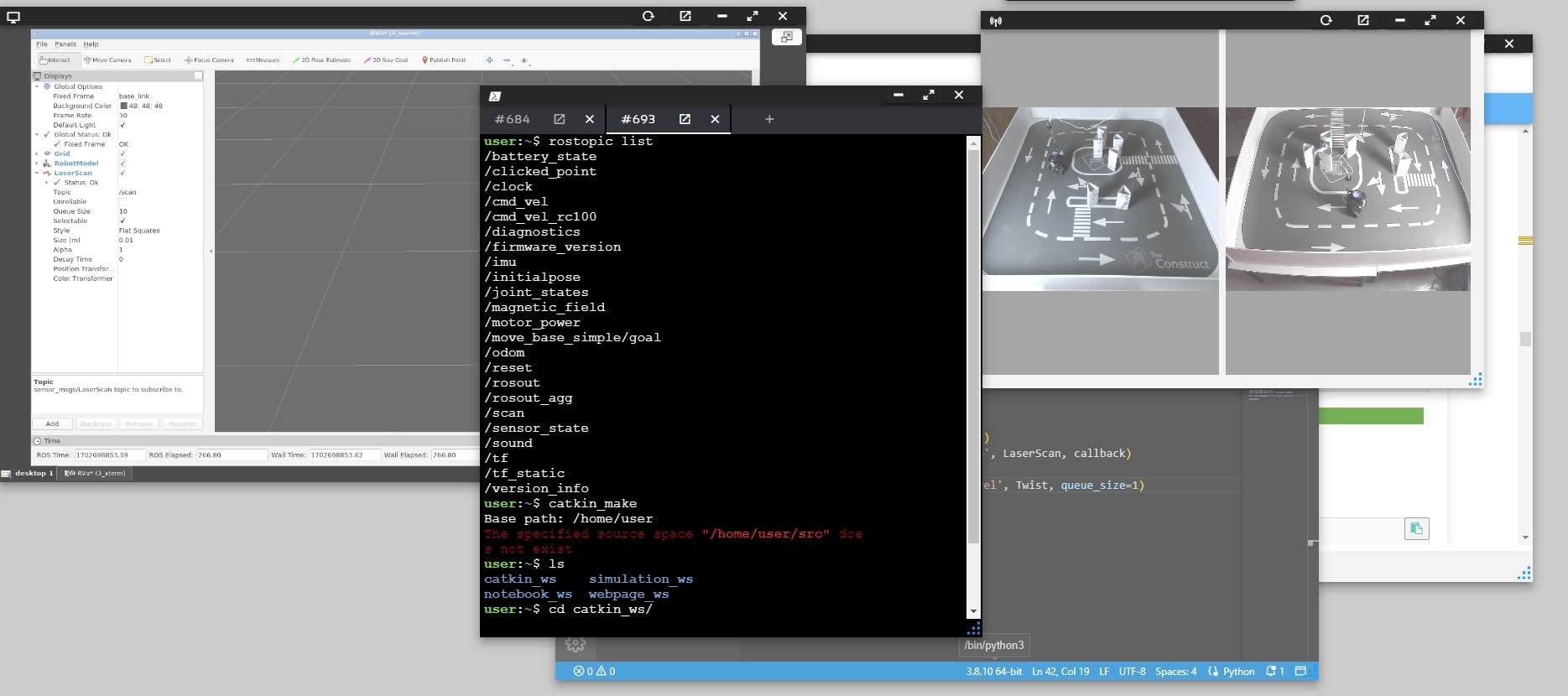
rostopic list didn’t have anything camera-related
rviz, I suppose understandably, wasn’t able to visualize the LaserScan with topic /scan
I was able to move the robot just fine with teleop so I don’t expect it was a connection problem. As a separate question, my rosrun command ($ rosrun scan_test scan_test.py) didn’t seem to do anything despite it working in simulation. With a real robot are we supposed to use roslaunch?
With this ROSJect “ROS Basics Real Robot Project”, I was able to run Turtlebot3 in Simulation and also topic was publishing when connected to Real Robot.