Hello, I am a new to ROS. And I am trying to follow the course " Using Nvidia Jetson Nano with ROS". In the Unit 1, I followed the instructions below:
The most straightforward method you have to execute programs on your Ignisbot is the following:
* First, upload all the my_ignisbot_move_pkg to a git.
* Then, connect to your Physical IgnisBot. To do that, you have different methods detailed in the next section.
* Download the code into IgnisBot catkin_ws and compile. Take into account that you have to compile for python3 if you want to be sure nothing strange is happening. Although if you followed the setup guide, you shouldn't have any strange errors. If any error arises, please write your issue in here: <a href="https://get-help.robotigniteacademy.com/"> RobotIgniteAcademy Forum</a>
I was wandering:
- "all the my_ignisbot_move_pkg " means what?
should it refers to the four python file(PCA9685.py ignisbot_wheels.py tailwag.py ignisbot_move.py) ? - When upload it to git, how should I name the repository? If I name it freely, after git clone, I am not sure if the path can find the python files correctly.
- And I am confused why download(git clone) "all the my_ignisbot_move_pkg "into the directory( ~/catkin_ws/src) , rather than directory(/home/jetbot/catkin_ws/src/my_catkin_ws_python3/src/my_ignisbot_move_pkg)? Since the folder my_ignisbot_move_pkg already existed but contains 4 blank python files.
- Which directory to execute the command(touch launch/ignis_real_drivers.launch), If I execute it in the directory( ~/catkin_ws/src),It get error like this:
touch: cannot touch 'launch/ignis_real_drivers.launch': No such file or directory
And if I execute it in the directory( jetbot@nano-4gb-jp45:~/catkin_ws/src/my_catkin_ws_python3/src/my_ignisbot_move_pkg) which already have the launch folder. I did not get error this try but in the later steps, I get error again like this:
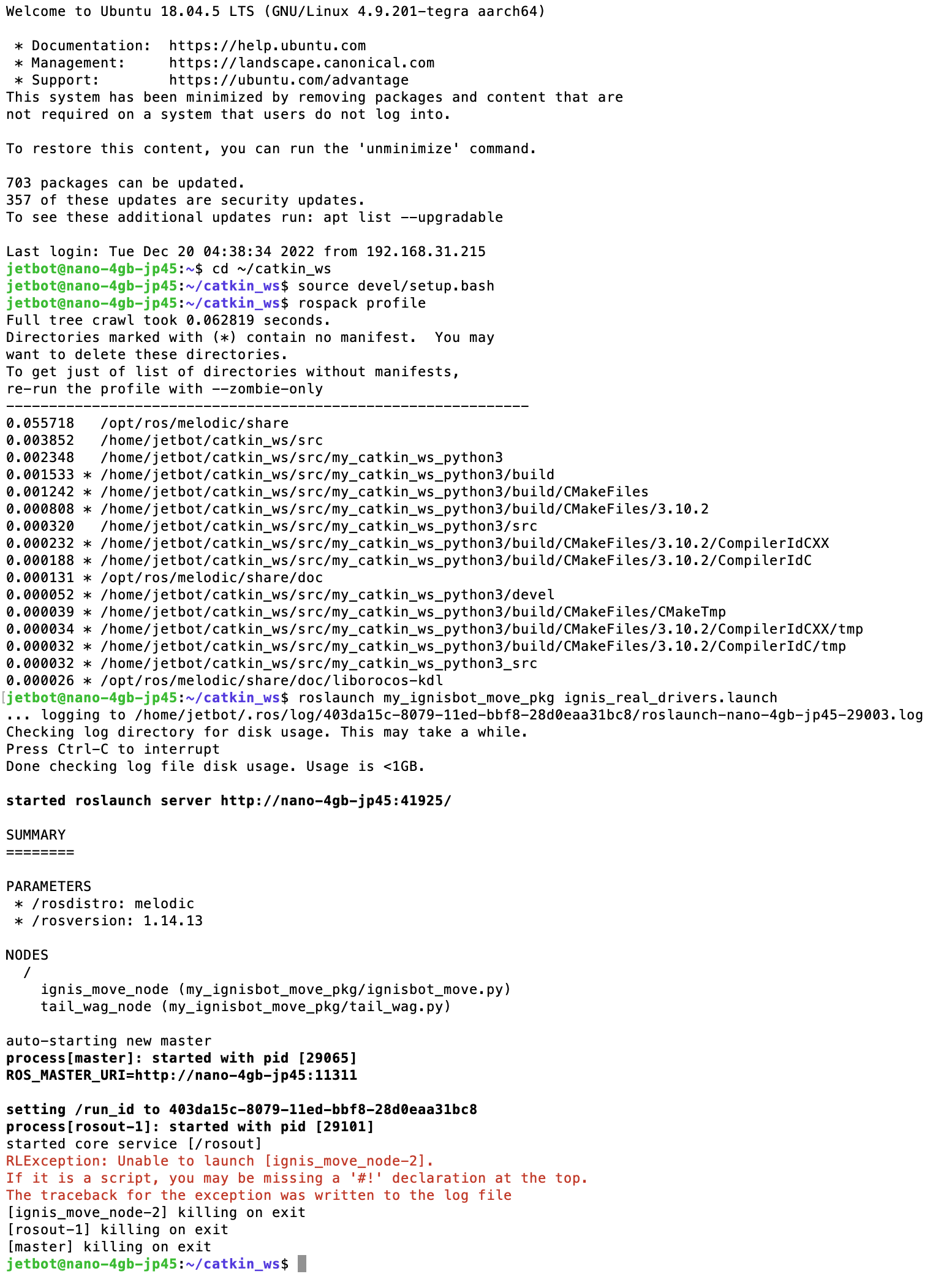
I am trying to describe my question, if it is not very clear, please tell me.
I really missing in how to execute which command in which directory. Looking for your help.
Thanks a lot
Jinwei