I’m doing the micro project. I want to start from the pi_robot_v2.urdf, I have created the launch files for the controllers, spawn the Gazebo model, but it shows the following error:
To spawn the model in Gazebo, you first need to ensure that all XACRO files corresponding to your custom humanoid robot are located in box_human_description/robot. Alternatively, you can use the files provided in the solution here.
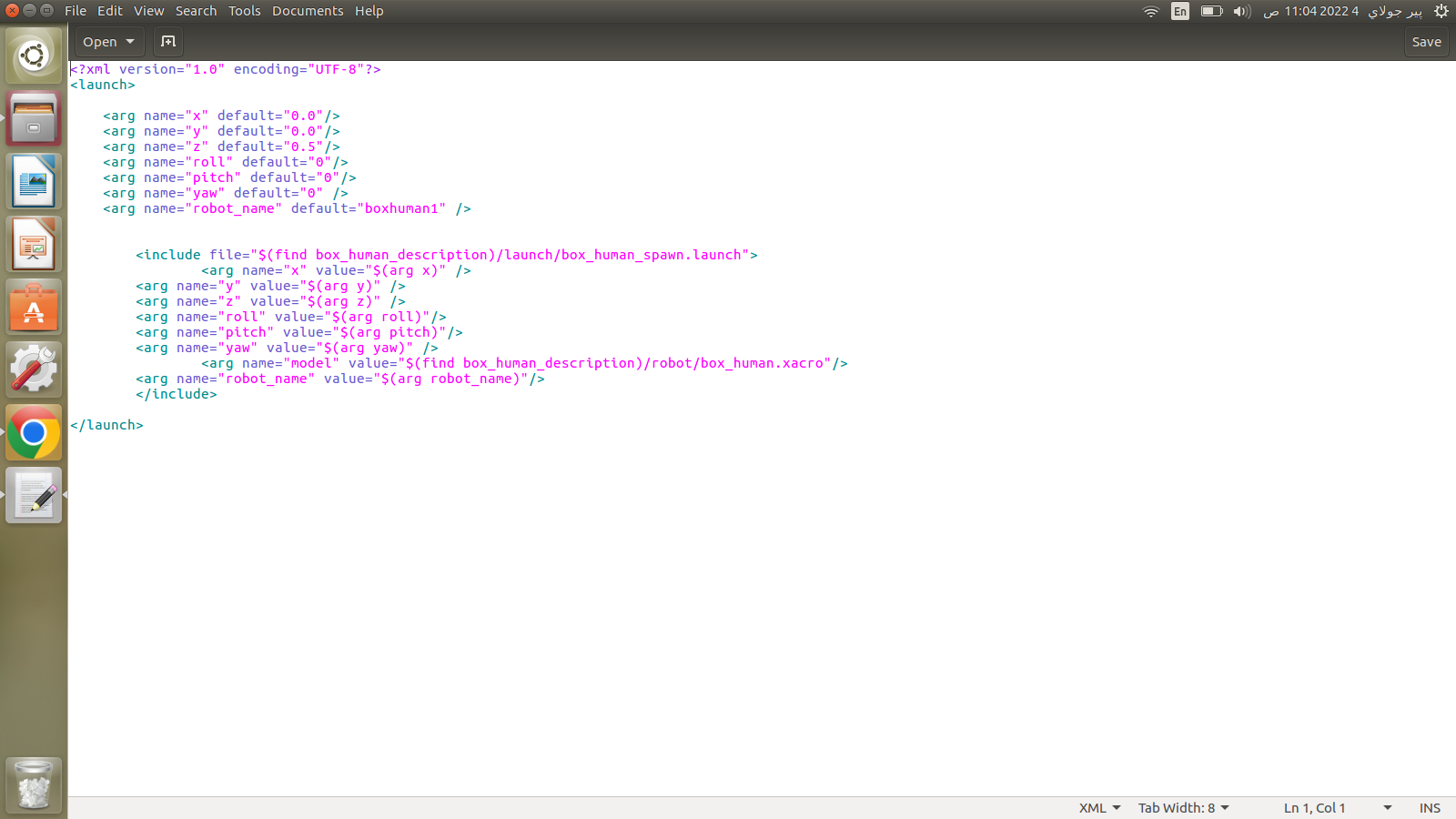
When using your launch file, I suggest using box_human_description/launch/box_human_spawn_xacro.launch (given in the project description) since XACRO files are used for robot description in this context. Therefore, you should include box_human_spawn_xacro.launch instead of box_human_spawn.launch :