Hi, hello everybody, i’ve just started the course for TF ROS2 and i have some struggle with this error:
i’ve followed the step so:
-source of the environment
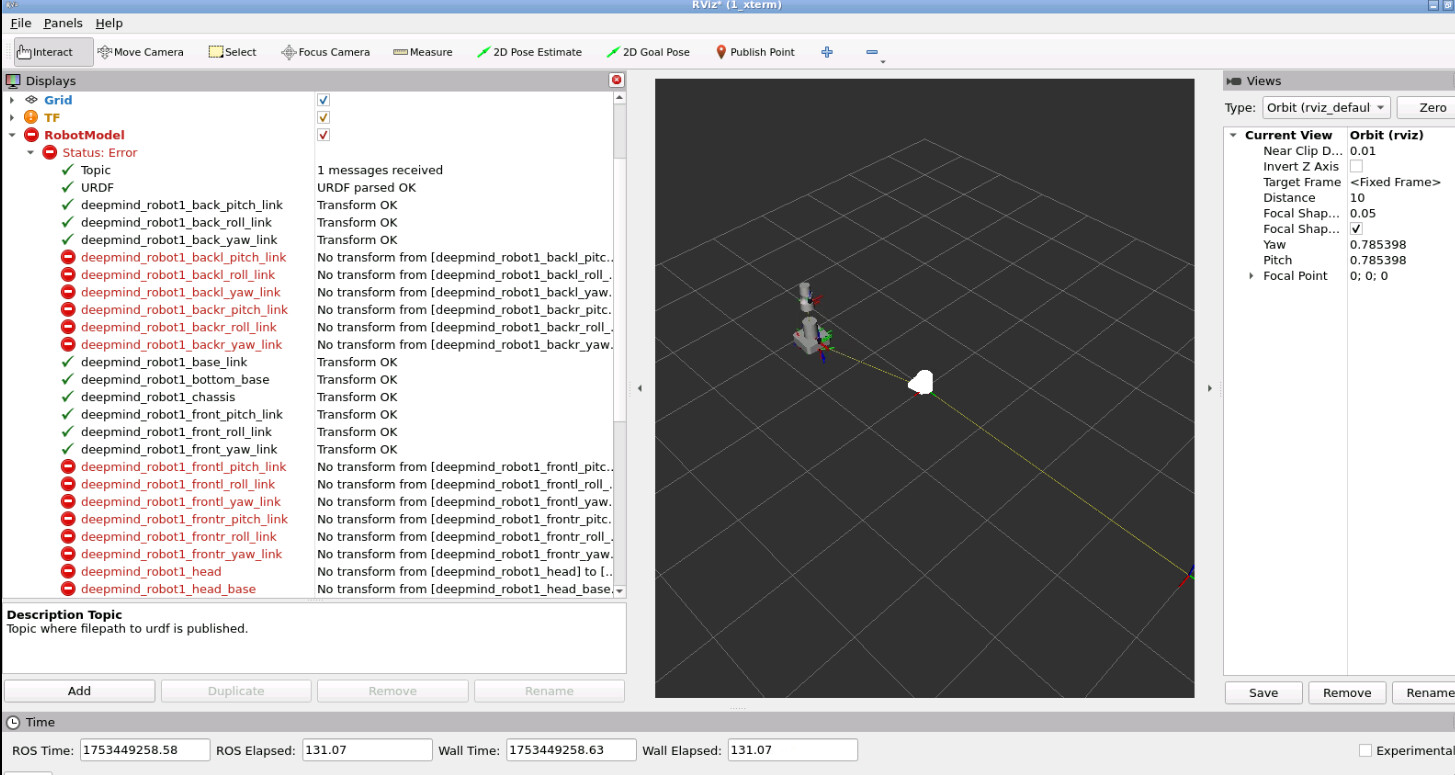
-open rviz2
-select the transform and robot description
and here we are. Rviz also tell me this:
Warning: Invalid frame ID "deepmind_robot1_backl_yaw_link" passed to canTransform argument source_frame - frame doesnot exist
at line 93 in ./src/buffer_core.cpp
Warning: Invalid frame ID "deepmind_robot1_backr_pitch_link" passed to canTransform argument source_frame - frame does not exist
at line 93 in ./src/buffer_core.cpp
Warning: Invalid frame ID "deepmind_robot1_backr_roll_link" passed to canTransform argument source_frame - frame does not exist
at line 93 in ./src/buffer_core.cpp
Warning: Invalid frame ID "deepmind_robot1_backr_yaw_link" passed to canTransform argument source_frame - frame doesnot exist
at line 93 in ./src/buffer_core.cpp
Warning: Invalid frame ID "deepmind_robot1_frontl_pitch_link" passed to canTransform argument source_frame - frame does not exist
at line 93 in ./src/buffer_core.cpp
Warning: Invalid frame ID "deepmind_robot1_frontl_roll_link" passed to canTransform argument source_frame - frame does not exist
at line 93 in ./src/buffer_core.cpp
Warning: Invalid frame ID "deepmind_robot1_frontl_yaw_link" passed to canTransform argument source_frame - frame does not exist
at line 93 in ./src/buffer_core.cpp
Warning: Invalid frame ID "deepmind_robot1_frontr_pitch_link" passed to canTransform argument source_frame - frame does not exist
at line 93 in ./src/buffer_core.cpp
Warning: Invalid frame ID "deepmind_robot1_frontr_roll_link" passed to canTransform argument source_frame - frame does not exist
at line 93 in ./src/buffer_core.cpp
Warning: Invalid frame ID "deepmind_robot1_frontr_yaw_link" passed to canTransform argument source_frame - frame does not exist
at line 93 in ./src/buffer_core.cpp
Warning: Invalid frame ID "deepmind_robot1_head_base" passed to canTransform argument source_frame - frame does not exist
at line 93 in ./src/buffer_core.cpp
etc etc etc
How can i solve it? i’ve tried to colcon build another time but nothing