Hi,
I’m trying to generate a map from my newly created world. Using this command:
roslaunch tiago_2dnav_gazebo tiago_mapping.launch public_sim:=true world:=tutorial_garage_new
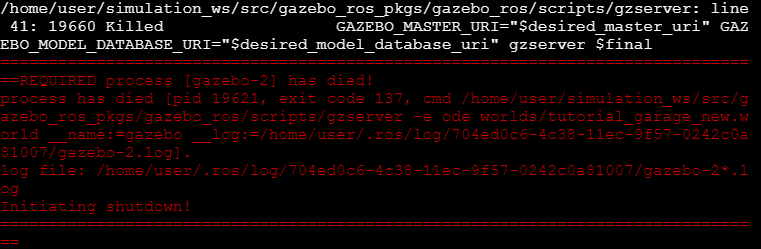
And I’m getting this error:
I’ve been going off this tutorial:
http://wiki.ros.org/Robots/TIAGo/Tutorials/Navigation/Mapping
Please if someone could tell me what I’m doing wrong here
Hi @martas17 ,
It is quite hard to know from the error message only.
There are some important points to check:
- Is the repository compatilble with the Rosject distro you are working with?
- Does the simulation require extra libraries to be installed?
- Is there any rosdep pending?
After filling these requirements, I’d need to try the rosject. Would you mind to share it with me using a share link?
Regards