Dear experts @staff and @duckfrost
I need to visualize a “new kind of object” in Rviz. This object is constructed based on the following parameters:
Oi={ˆx,P,ˆd,dσ2,p(∃x),c,f}
where x is the location (x, y , vx, vy, ax, ay, yaw, yaw-rate)
and P probability to the object existence
d = Dimensions (length and width)
c - classification
f - feature detected by the sensor of the car - Rear left or Rear right for example…
etc…
I have created the message which receives these values and tested with a publisher…assigning values…The rostopic echo of this topic is below:
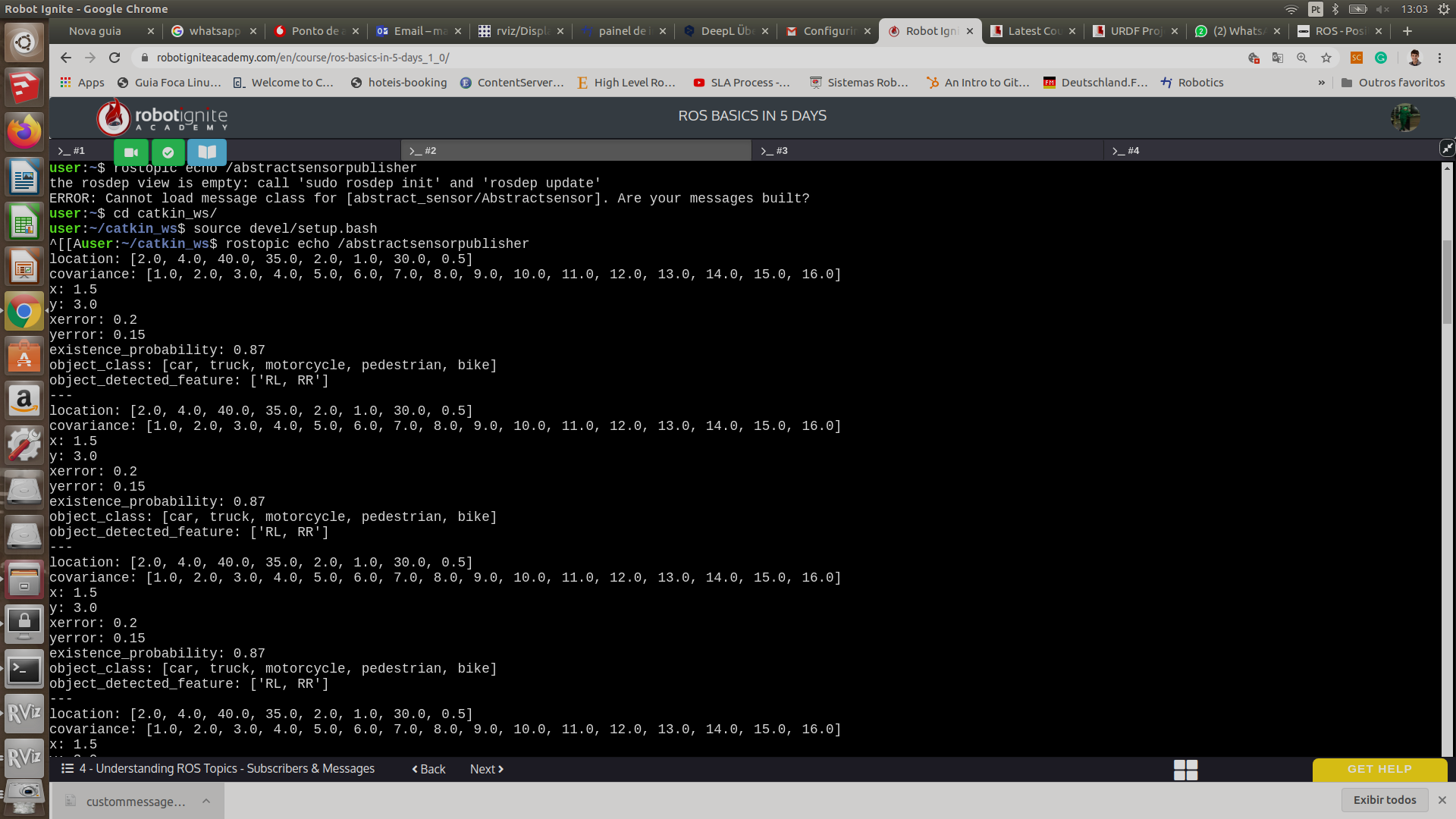
So the question is… If I have for example Radar, camera or whatever be the sensor amount and the type of it…they always will give me information with the features displayed on the screen above. And my question is.
I have for example in Rviz the “LaserScan” plugin, where I can add it and then access the topic which the LaserScan messages are being published…and finally, I can see the laser data shapes on Rviz screen…
But for my case in which I desire to see the object which is in Highway…car, truck or etc…(as defined in on of these messages parameter) as a primitive rectangle proportional to the dimensions is specified in this message (length, width) and position (x,y) orientation (yaw angle, yaw rate) velocity (vx, vy) acceleration (ax, ay)….so how can I access this customized data (which is being sent in a topic) in Rviz? Must I create a new Rviz plugin for that? how can I do that, in order to “Materialize” the data which is being read in my topic (convert to a visual object)? and where and how can I access this topic in Rviz (through) which plugin?
Thanks in advance