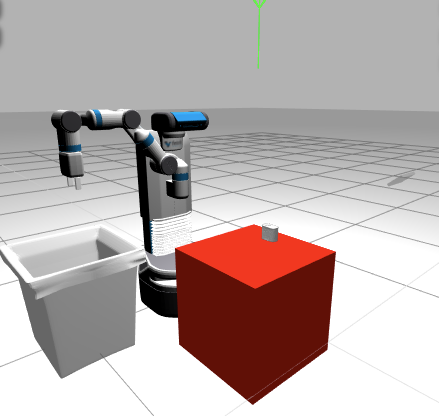
While starting the above sub-course in my issue title, I have noticed that the Gazebo simulations of the within the workspace don’t seem to be correct. For example, here is Unit 2 with the Jupyter notebook showing the location of the SpamCan in correct position:
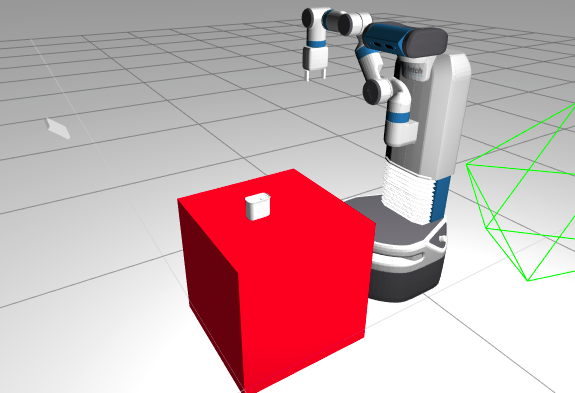
Here is a screenshot of how it actually is:
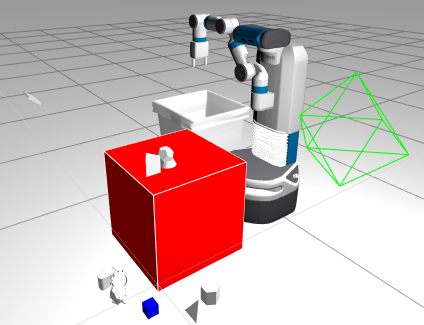
I am not sure that I can go ahead and complete the training if the Gazebo simulation is incorrect. I noticed that in the prior unit, a bunch of the objects have fallen off of the cube, as such:
(As an aside, this is not the third time that I have reported bugs and inconsistencies within the forums and have not had any responses as to if or when they will be fixed. I am starting to get frustrated at using this service to educate myself with ROS.)