I was doing the project. But I am not shure if I need to program(as in the picture) or if I need to design all of the components. Because that seems as a large mess what is unclear and unefficent.
So what is needed?
I was doing the project. But I am not shure if I need to program(as in the picture) or if I need to design all of the components. Because that seems as a large mess what is unclear and unefficent.
So what is needed?
Hi @gyselid ,
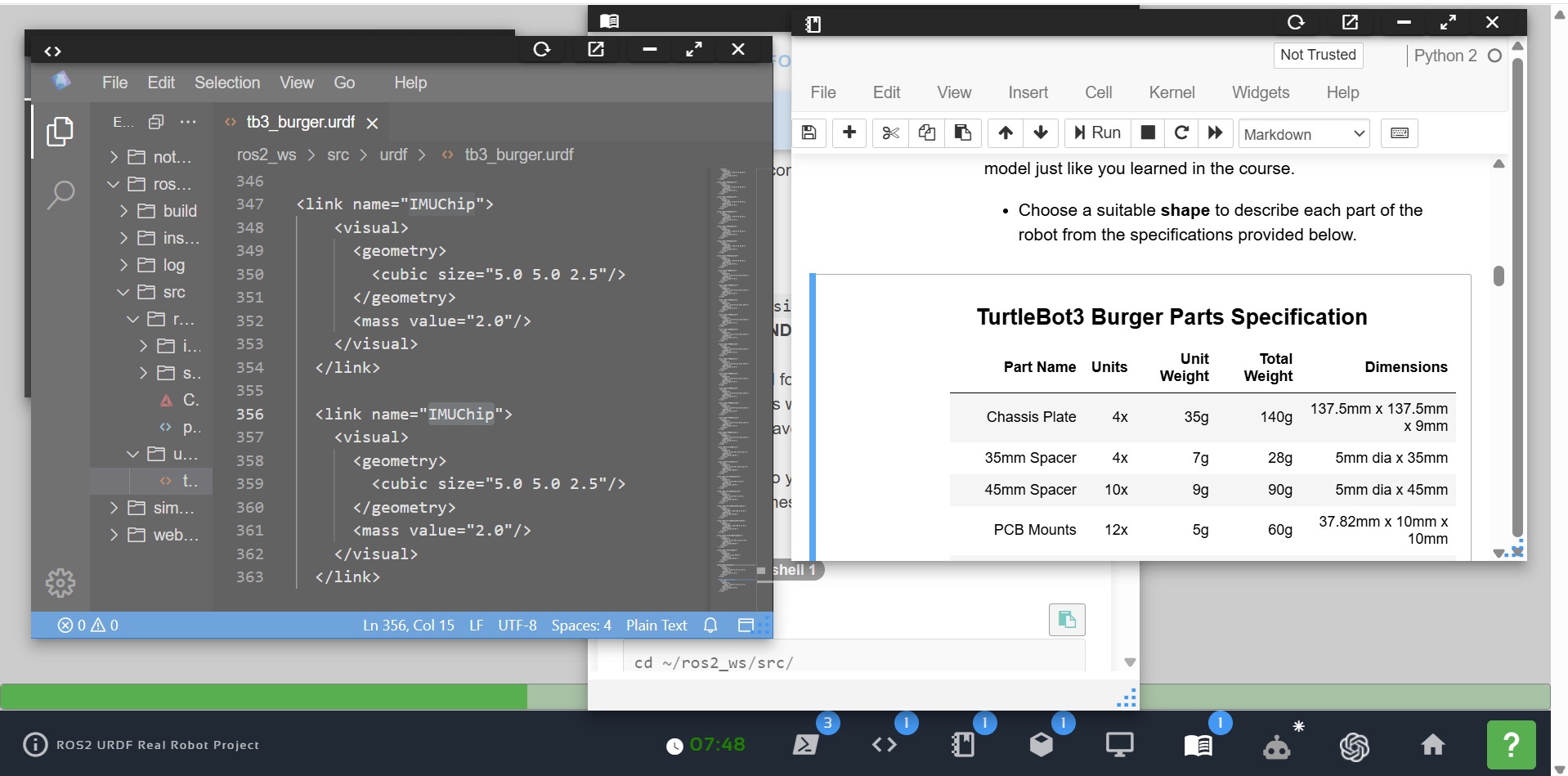
Yes, the part names are given along with their masses and dimensions for inertial properties that you need to provide for each part in the URDF file when you are designing the robot.
So you will design all the components using simple URDF shapes like box, cylinder and sphere using the provided dimensions. You will not be using any CAD program to design those. You will provide the same dimensions to visual and collision properties of the robot.
I think you are very unclear on how to make a URDF file. I suggest that you understand how to design a URDF file for a robot from the course.
There is no programming here. You will just design the URDF file with the provided part dimensions and masses.
I think you still have not understood how a URDF file is made. I suggest that you read through the course material again to understand the basics of URDF and why it is needed.
If you are not ready to revisit your course, then search the internet for any robot’s URDF file and see why they have specified masses for each part and their dimensions.
NOTE: URDF stands for Universal Robot Description Format. So in a URDF file, you are basically describing the whole robot design in a way that ROS understands.
I hope that helps!
Regards,
Girish
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.