Hi,
I am learning unit5 of “OpenCV Basics for Robotics”. There is a case to extract the polygon with corners which are centers of markers, out of the original image. I followed the step as what the case on course book says, but get a wired output.
My code is:
#! /usr/bin/env python
import rospy
import cv2
import numpy as np
from cv2 import aruco
###################################################
###### subtract artag area from given image ######
###################################################
class Tags_Class():
def __init__(self):
# get source image
self.img = cv2.imread(
'/home/user/catkin_ws/src/opencv_for_robotics_images/Unit_5/Course_images/Examples/a3.jpg')
self.img_h, self.img_w = self.img.shape[:2]
self.img_h = int(self.img_h * 0.7)
self.img_w = int(self.img_w * 0.7)
self.img = cv2.resize(
self.img, (self.img_w, self.img_h))
self.gray = cv2.cvtColor(self.img, cv2.COLOR_BGR2GRAY)
# get iamge to be added
self.added_img = cv2.imread(
'/home/user/catkin_ws/src/opencv_for_robotics_images/Unit_5/Course_images/Examples/earth.jpg')
self.added_h, self.added_w = self.added_img.shape[:2]
self.added_coordinates = np.array(
[[0, 0], [self.added_w, 0], [0, self.added_h], [self.added_w, self.added_h]])
# initialize the dictionary
self.tags_dict = aruco.Dictionary_get(aruco.DICT_6X6_250)
self.params = aruco.DetectorParameters_create()
# to store the coordinates of markers' centers
self.centers = []
def coordinate_order(self, centers, module):
# get a list 'centers' with 4 points, and order them in anticlockwise
order_centers = np.zeros((4, 2), dtype="int")
# In the previous code, we sorted the coordinates to a specific order.
# For this part, we need this order and also a second sort changing the position 2 and 3 of the array.
# This is done just for the algorithm to work well.
# When we work with the convexPoly, it works with a different order than the warped image with the homography.
if module == 1:
sum = centers.sum(axis=1)
order_centers[0] = centers[np.argmin(sum)]
order_centers[3] = centers[np.argmax(sum)]
diff = np.diff(centers, axis=1)
order_centers[1] = centers[np.argmin(diff)]
order_centers[2] = centers[np.argmax(diff)]
elif module == 2:
sum = centers.sum(axis=1)
order_centers[0] = centers[np.argmin(sum)]
order_centers[2] = centers[np.argmax(sum)]
diff = np.diff(centers, axis=1)
order_centers[1] = centers[np.argmin(diff)]
order_centers[3] = centers[np.argmax(diff)]
return order_centers
def main(self):
###### detect the corners and id's in the examples ######
corners, ids, rejectedImgPoints = aruco.detectMarkers(
self.gray, self.tags_dict, parameters=self.params)
rospy.loginfo("ids: " + str(ids))
###### centers of markers ######
for i in range(len(ids)):
# draw centers of markers with circle
marker = corners[i]
marker = marker[0]
marker_center = marker.mean(axis=0)
rospy.loginfo("coordinate of marker's center is: " +
str(marker_center))
cv2.circle(
self.img, (int(marker_center[0]), int(marker_center[1])), 3, (255, 255, 0), -1)
self.centers.append((int(marker_center[0]), int(marker_center[1])))
# order the centers
self.centers = np.array(self.centers)
self.centers = self.coordinate_order(self.centers, module=2)
print("self.centers after ordering: ")
print(self.centers)
# draw contours
ordered_img = self.img.copy()
cv2.drawContours(ordered_img, [self.centers], -1, (150, 150, 0), -1)
aruco.drawDetectedMarkers(ordered_img, corners, ids)
cv2.imshow("detected markers with ordering", ordered_img)
###### create black mask ######
black_mask = np.zeros([self.img_h, self.img_w, 3], dtype=np.uint8)
cv2.fillConvexPoly(black_mask, np.int32(
[self.centers]), (255, 255, 255), cv2.LINE_AA)
# cv2.imshow('black mask', black_mask)
###### subtraction ######
subtraction = cv2.subtract(ordered_img, black_mask)
cv2.imshow("subtraction", subtraction)
###### addtition of added image ######
# get homography matrix from added image to the shape of polygon with 'centers' as corners
hom, status = cv2.findHomography(self.added_coordinates, self.centers)
# https://theailearner.com/tag/cv2-warpperspective/
warped_img = cv2.warpPerspective(
self.added_img, hom, (self.img_w, self.img_h))
cv2.imshow("warped image", warped_img)
addition = cv2.add(warped_img, subtraction)
cv2.imshow("addition", addition)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == "__main__":
rospy.init_node("tags_8_node")
tags = Tags_Class()
tags.main()
But I got this output:
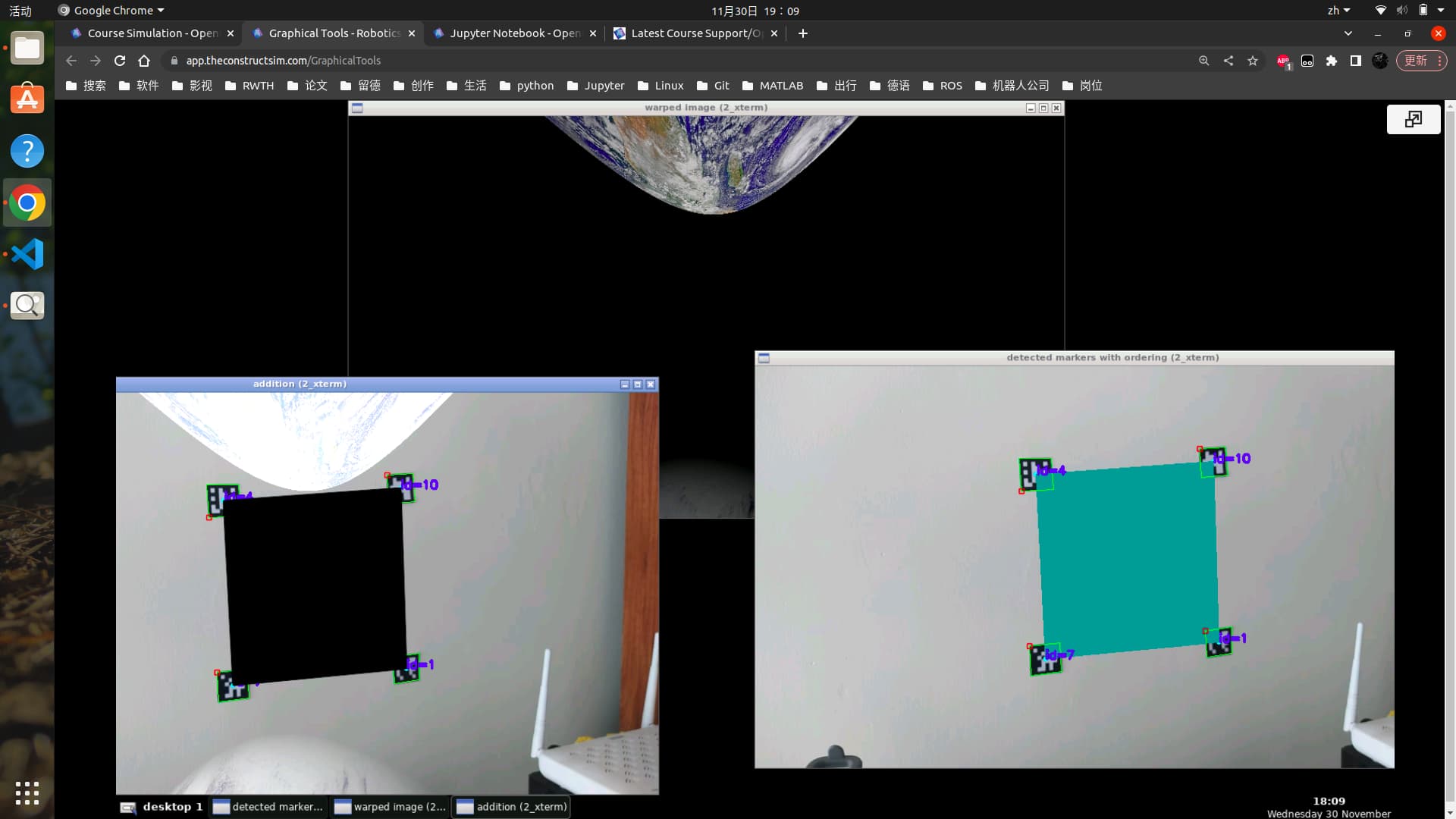
I noticed that there is one sentence in course book to explain why we should have another “coordinate ordinger” method:
"
In the previous code, we sorted the coordinates to a specific order. For this part, we need this order and also a second sort changing the position 2 and 3 of the array. This is done just for the algorithm to work well. When we work with the convexPoly, it works with a different order than the warped image with the homography. This variation can be seen in the function “order coordinates”.
"
But I still cannot understant what it actually does. And when I switch to this new coordinate ordering, by changing only one param:
self.centers = self.coordinate_order(self.centers, module=1)
I got this output:
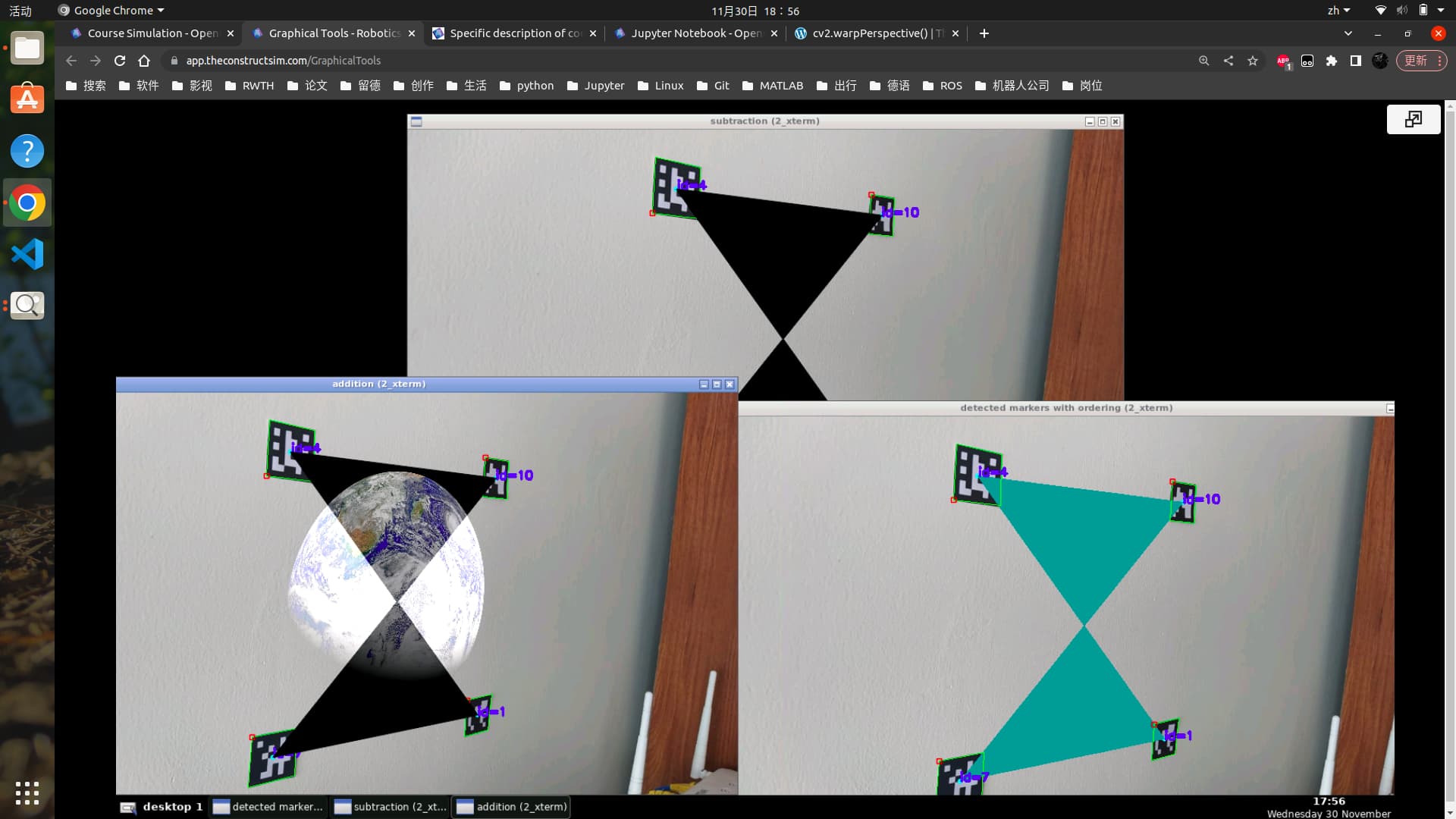
It is still wired. It seems the new coordinate ordering just destroy the correct order of markers, but it make warpped image correct. I don’t understand, according to the code, what is the relation between this order and warpped image?
Another question, even though the output is correct as what is shown in course book, how can we ensure warpped image exactly fit in the dark zone, which was extracted before from main image? I didn’t find any codes do this work, but it does work,
Thanks a lot for explanation.