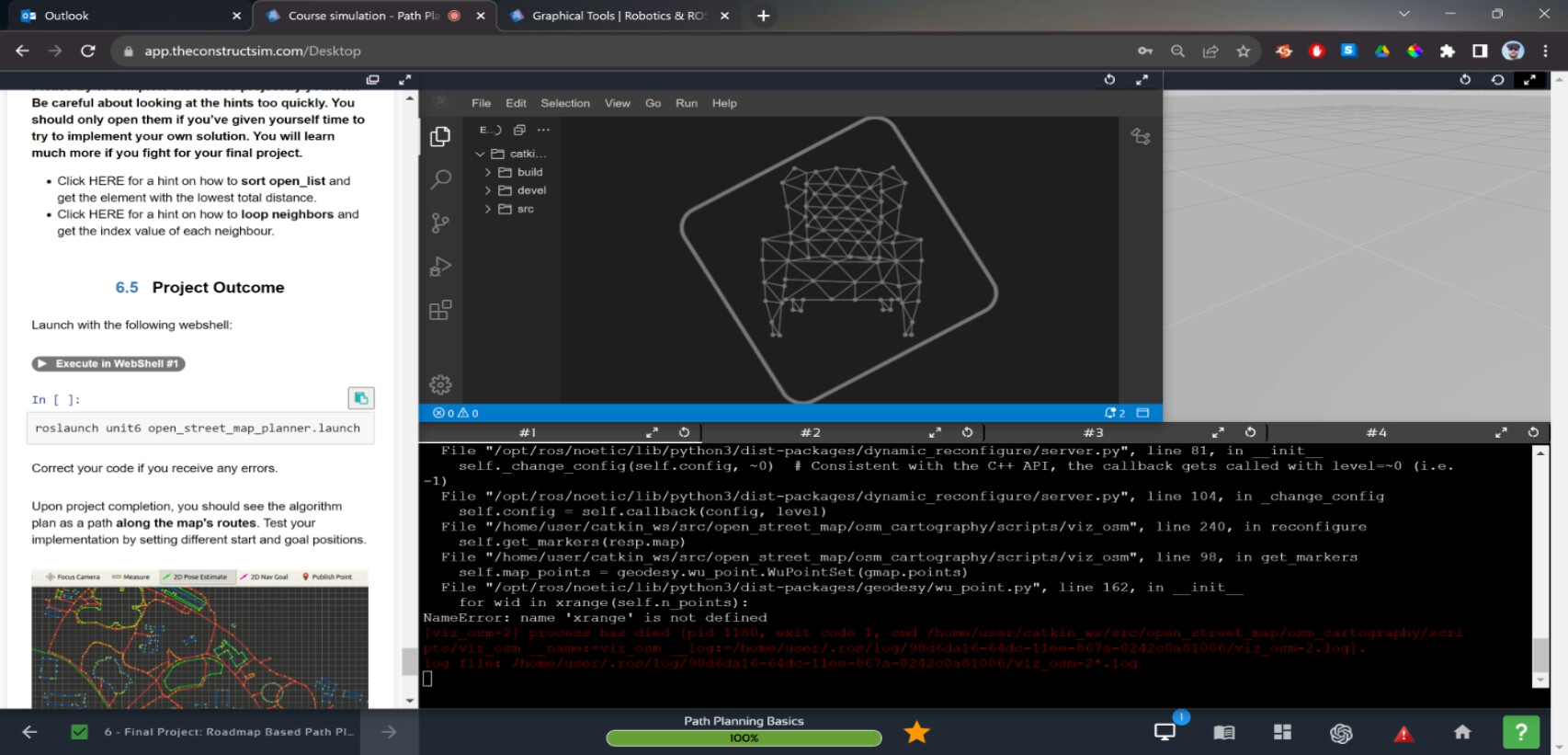
I cant get this last part done because there is some kind of error caused by the backage being done on python 2 and ros being python 3. i tried to fix it but it did not work out
We updated the repo of the project with all the changes for Python3.
Please check the beginning of the Final Project unit, where we indicate which repo to clone.