Hello,
the localization works. The trasformations work.
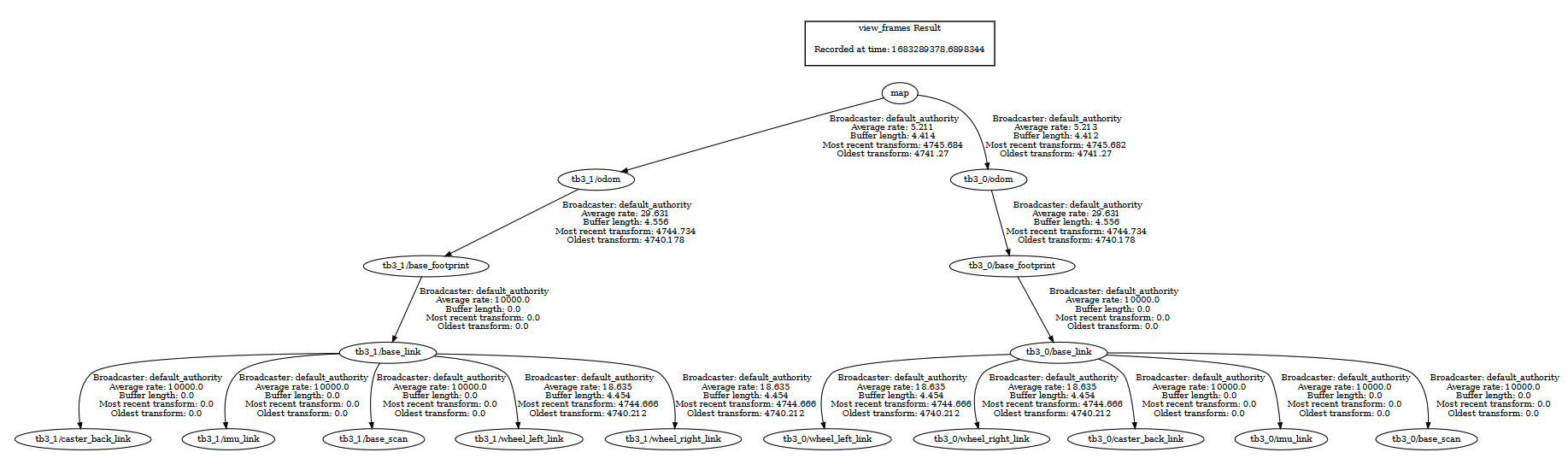
I am able to set the initial position of the two robots.
When I launch the planner I get these errors
[lifecycle_manager-5] [ERROR] [1683288841.895942475] [tb3_0_lifecycle_manager_multi_pathplanner]: Server tb3_0/planner_server was unable to be reached after 4.00s by bond. This server may be misconfigured.
[lifecycle_manager-5] [ERROR] [1683288841.896029864] [tb3_0_lifecycle_manager_multi_pathplanner]: Failed to bring up all requested nodes. Aborting bringup.
[lifecycle_manager-10] [ERROR] [1683288841.968176116] [tb3_1_lifecycle_manager_multi_pathplanner]: Server tb3_1/planner_server was unable to be reached after 4.00s by bond. This server may be misconfigured.
[lifecycle_manager-10] [ERROR] [1683288841.968267232] [tb3_1_lifecycle_manager_multi_pathplanner]: Failed to bring up all requested nodes. Aborting bringup.
[lifecycle_manager-5] terminate called after throwing an instance of ‘statemap::TransitionUndefinedException’
[lifecycle_manager-5] what(): no such transition in current state
[lifecycle_manager-10] terminate called after throwing an instance of ‘statemap::TransitionUndefinedException’
[lifecycle_manager-10] what(): no such transition in current state
[ERROR] [lifecycle_manager-5]: process has died [pid 11729, exit code -6, cmd ‘/opt/ros/galactic/lib/nav2_lifecycle_manager/lifecycle_manager --ros-args -r __node:=tb3_0_lifecycle_manager_multi_pathplanner --params-file /tmp/launch_params_8zn56_rx --params-file /tmp/launch_params_ugzdwuat’].
[ERROR] [lifecycle_manager-10]: process has died [pid 11819, exit code -6, cmd ‘/opt/ros/galactic/lib/nav2_lifecycle_manager/lifecycle_manager --ros-args -r __node:=tb3_1_lifecycle_manager_multi_pathplanner --params-file /tmp/launch_params_ww0r9hij --params-file /tmp/launch_params_h2vsdtks’].
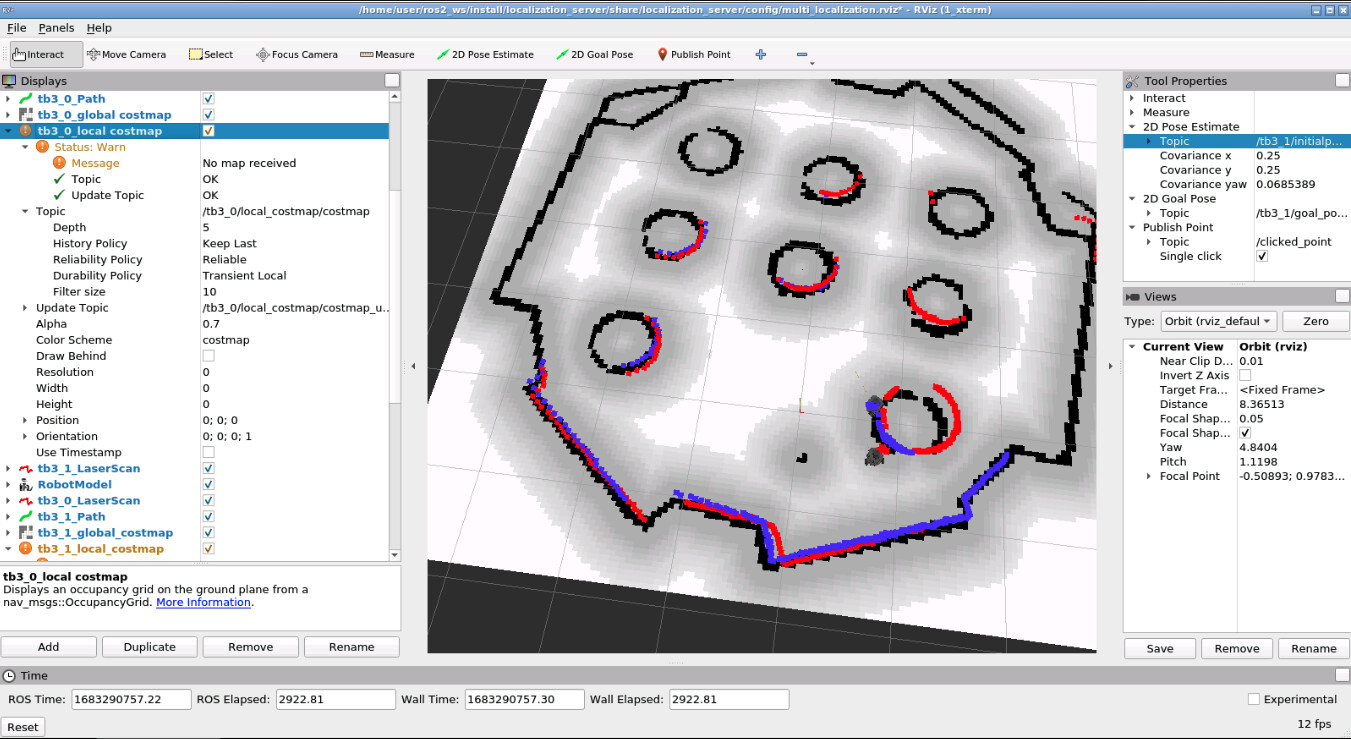
Also in the rviz2 does not receive the map of the local costmap