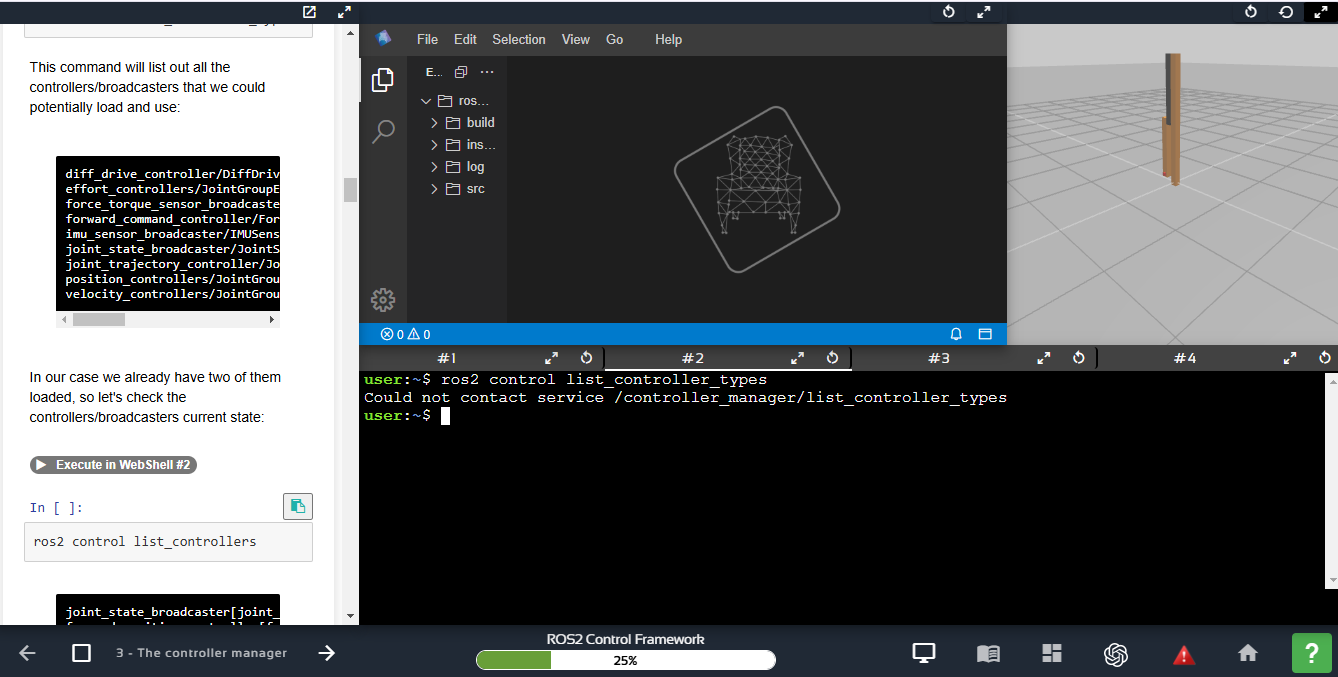
I am working on the ROS 2 Control Framework course and on chapter 3, I am getting the error saying that “Could not contact service /controller_manager/list_controller_types” in the image attached below. Kindly assist on this issue
Hello @Takudzwa ,
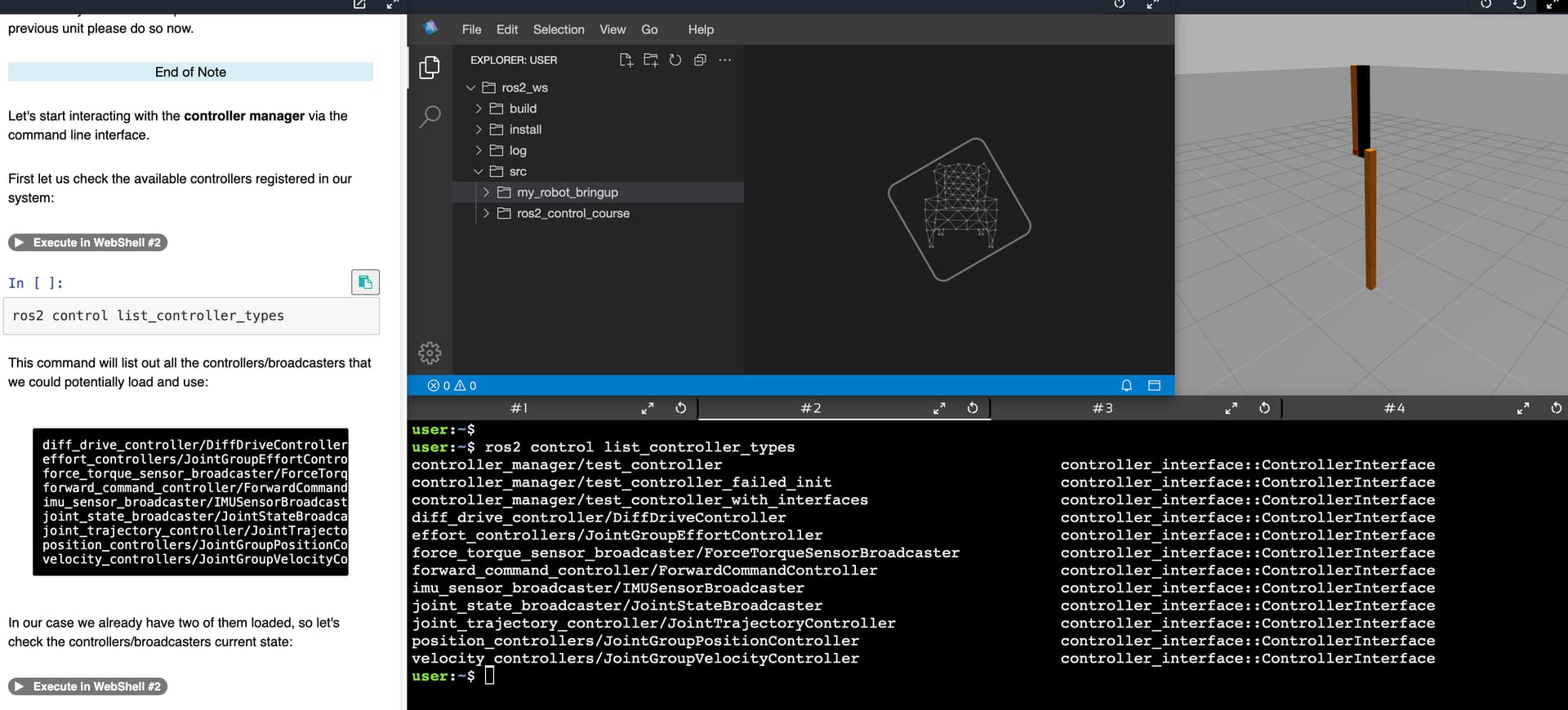
Try relaunching your simulation in Shell #1. Looking at your image, it looks like there’s something wrong there. During my tests, where everything worked fine, the simulation looked like this at this point (which also means the controllers are properly loaded and active):
Hope this helps,
Hello
Thank you for the assistance but I’m still getting the same error message when I try to relaunch the simulation in webshell 1 again
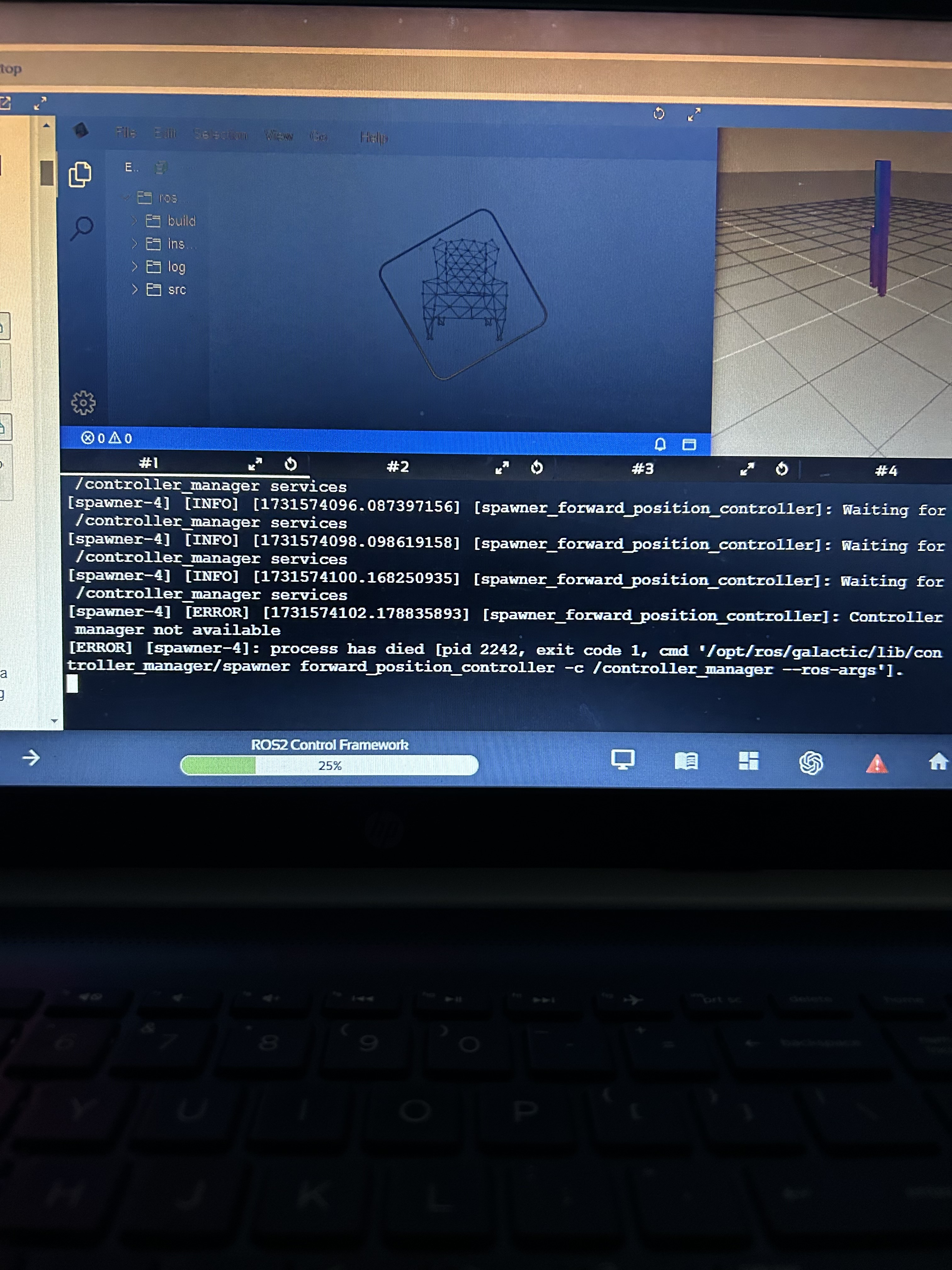
It looks like the controller manager has not been launched.
Can you show the full output of the terminal number 1 to see if something failed during the launch of the simulation?
Hello @Takudzwa ,
As Ricardo suggested, we can see from the new image you shared that the problem comes from the simulation, where the controller manager (and this, the controllers) is not being properly started. This step is done in the previous unit (ROS2_control basics), so you should move back to that unit and verify you have properly done all the steps.
There are 3 possible reasons why this could happen:
- Your configuration file controller_configuration.yaml is not correct. For this, check the exercises 2.3.1 and 2.7.1, where this file is created and modified.
- Your launch file my_robot.launch.py is not correct. For this, check the exercise 2.5.1 where this launch file is created.
- You did not update the file rrbot.xacro in order to add the ros2_control tag and the corresponding Gazebo plugin. For this, check the exercises 2.4.1 and 2.7.1, where this file is updated.
My recommendation would be that you review, step by step, the previous unit and make sure that you have properly followed all the steps and exercises described there. If you do so, your simulation will launch properly, including all the controllers, and you will be able to continue with the next unit without any issues.
Additionally, in case you still have problems finding the error, you can send me your package my_robot_bringup to my e-mail (aezquerro@theconstruct.ai) so that I can better assist you in identifying exactly where the error is.
Best,
This topic was automatically closed 7 days after the last reply. New replies are no longer allowed.