I am working on the Rosject for ROS2 Basics (C++) Course. The very first step states to type this in the terminal window: source ~/simulation_ws/install/setup.bash
After typing this, the following error message is shown:
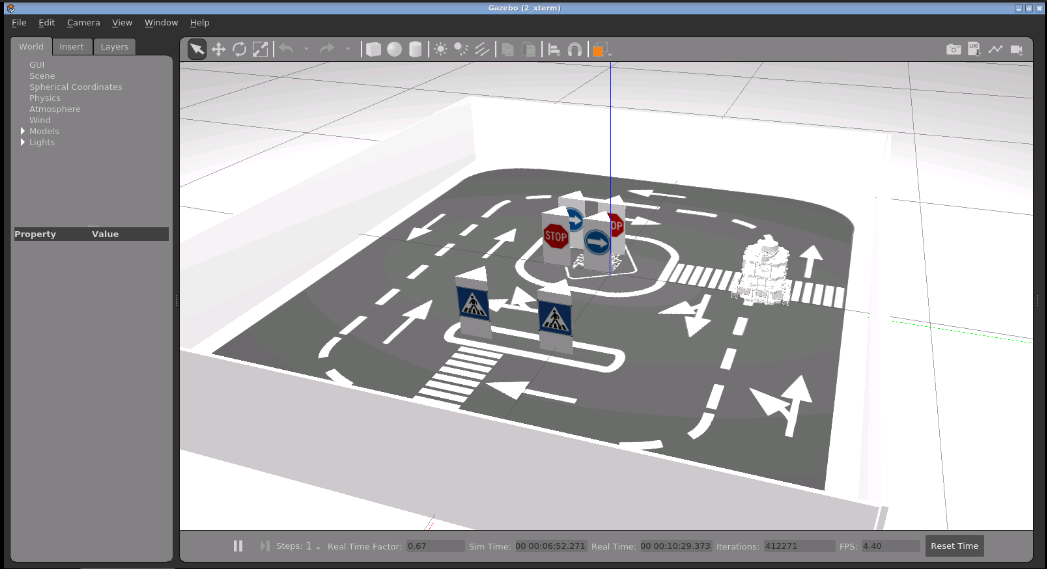
After launching the simulation, the robot appears with no textures:
I am not sure if the issue with sourcing the local_setup.bash is related to the textureless robot, but solving the sourcing issue first would be nice.
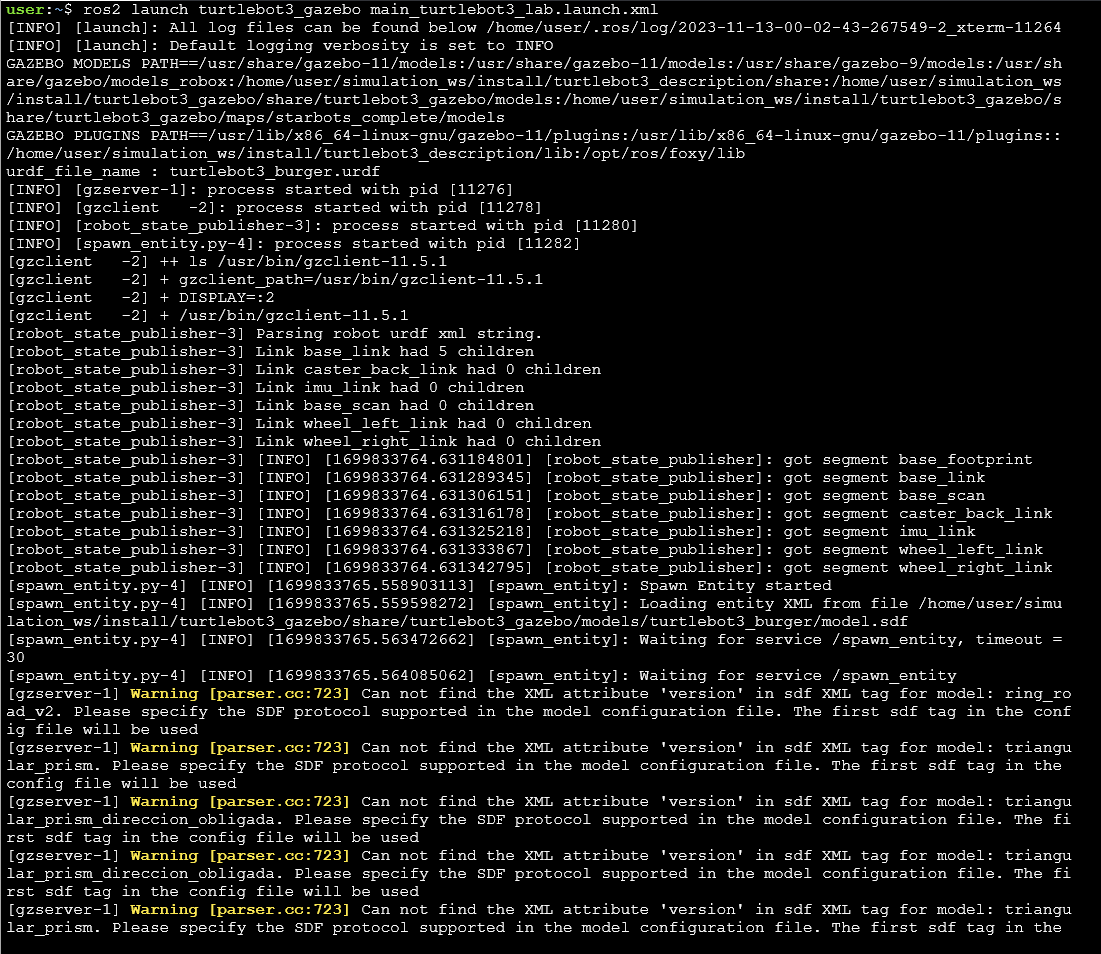
This is the terminal output after launching the simulation:
The robot is textureless. We are using the model from the official TurtleBot3 repository.
The output you see seems to be an old package that is not needed, but the last compilation still included it. It does not affect the simulation.
Thanks @roalgoal. What causes the local_setup.bash file message to be printed? Can you give me some advice, I would like to learn more and learn how to fix it. Thanks.
Hi @roalgoal before this topic closes, are you able to explain why I get the not found:... error shown in my previous reply? I would like to know for my own learning and perhaps try to fix it in my rosject. Thanks.
Yes, that’s because there was a package that was previously installed in that workspace that is now not there. It was an oversight while preparing that workspace. Sounds like that package is in the official turtlebot3 repo for the real robot. Since there is no real robot in the project, it was removed.
So to fix it, the /install and /build folders can be deleted and the workpace recompiled.
That will get rid of the message, but of course you can have other compilation issues that our team previously fixed, so I don’t recommend it unless you want to practice on how to compile a package with open source repositories.
1 Like