I followed the instructions and the example worked upto the place where we check our new service msg: rossrv list | grep MyCustomServiceMessage

In second part Using a Custom Service Message:
I created the custom_service_server.cpp and copied the code as well as modified the CMakeLists.txt
I am really not sure that we have to create a launch file, but I create one for this package.
<launch> <node pkg="my_custom_srv_msg_pkg" type="custom_service_server" name="service_server" output="screen"/> </launch>
I complied the package using : user:~/catkin_ws$ catkin_make --only-pkg-with-deps my_custom_srv_msg_pkg
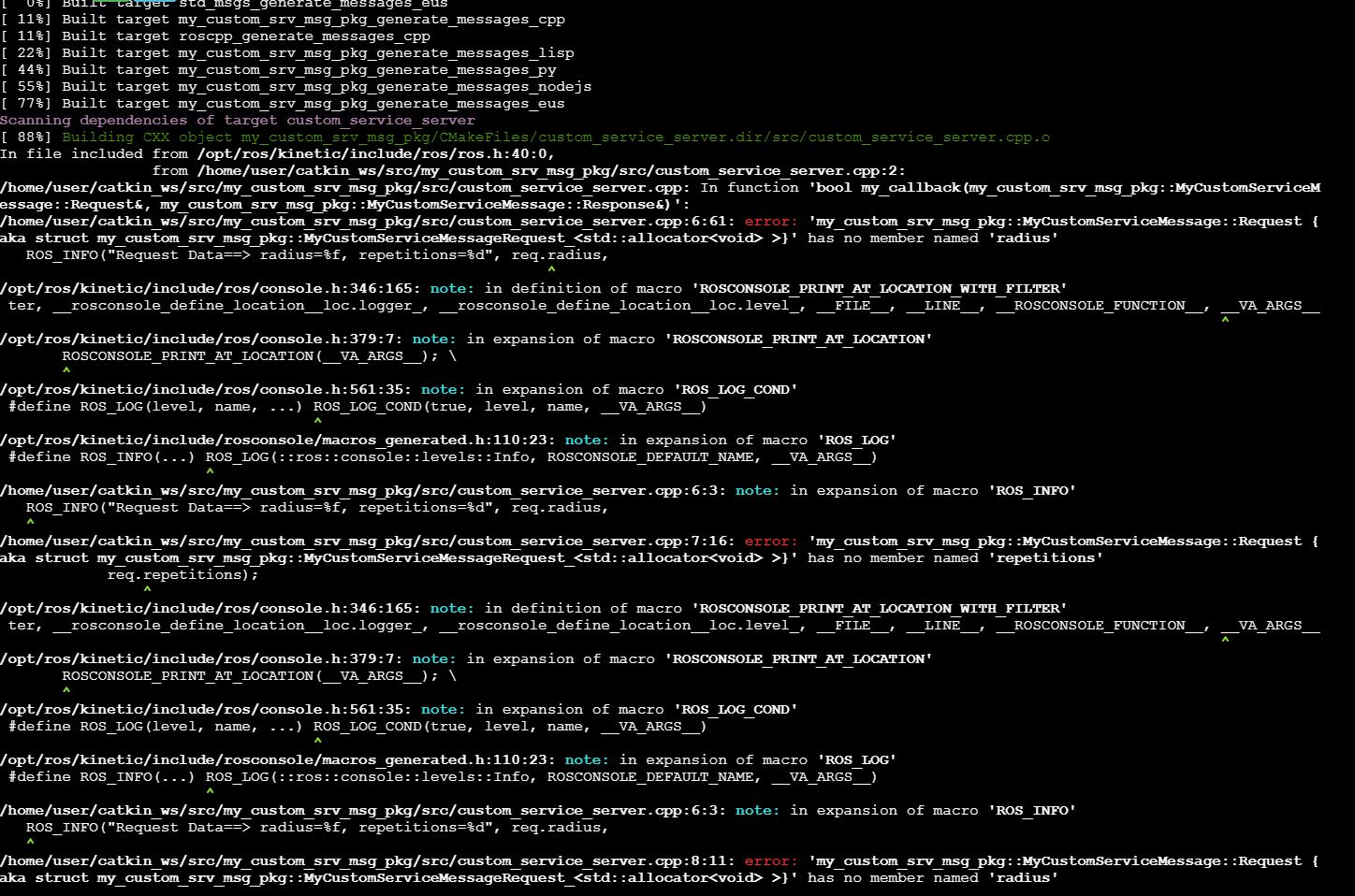
and encountered the following error
any suggestions what I am doing wrong here?
Thank you very much in advance!!
Hi @shaktigehlaut,
Does your service message define radius and repetitions, which the C++ code is trying to access? The error message says it cannot find these as “members” of your custom message.
If you copy-pasted the sample message and the sample C++ code verbatim, this error will happen, as the sample (meant to be a sample, not the real thing  ) message does not contain these members:
) message does not contain these members:
int32 duration # The number of times BB-8 has to execute the square movement when the service is called
---
bool success # Did it achieve it?
Could you please check that and let us know?
Hi @bayodesegun thanks for the quick reply.
Yes you are right my message contains the same message, which was created in the first part.
So I should change the message content, so it will be compiled correctly?
1 Like
Yes  , either add those members to the message definition or remove them from the C++ code, whichever you find easier.
, either add those members to the message definition or remove them from the C++ code, whichever you find easier.
However, the real exercise comes next!
@bayodesegun Thank you very much!!
1 Like