Hi, before posting this question i did searched the form and found similar question since 2021 and no much responses. Also i could see the code was diff way back then, than now.
The problem i see is in specific to the update after it completes its movement (`move_forward/backward). I have tried to add sleep through diff thread (though this is supposed to be a basic c++ beginner course), im getting the same position as initially recorded.
looking at the class implementation, seems the get position just calls the this->x but when searching for a place if its getting updated, i got lost.
so i tried by editing the base class implementation to display the position like this.
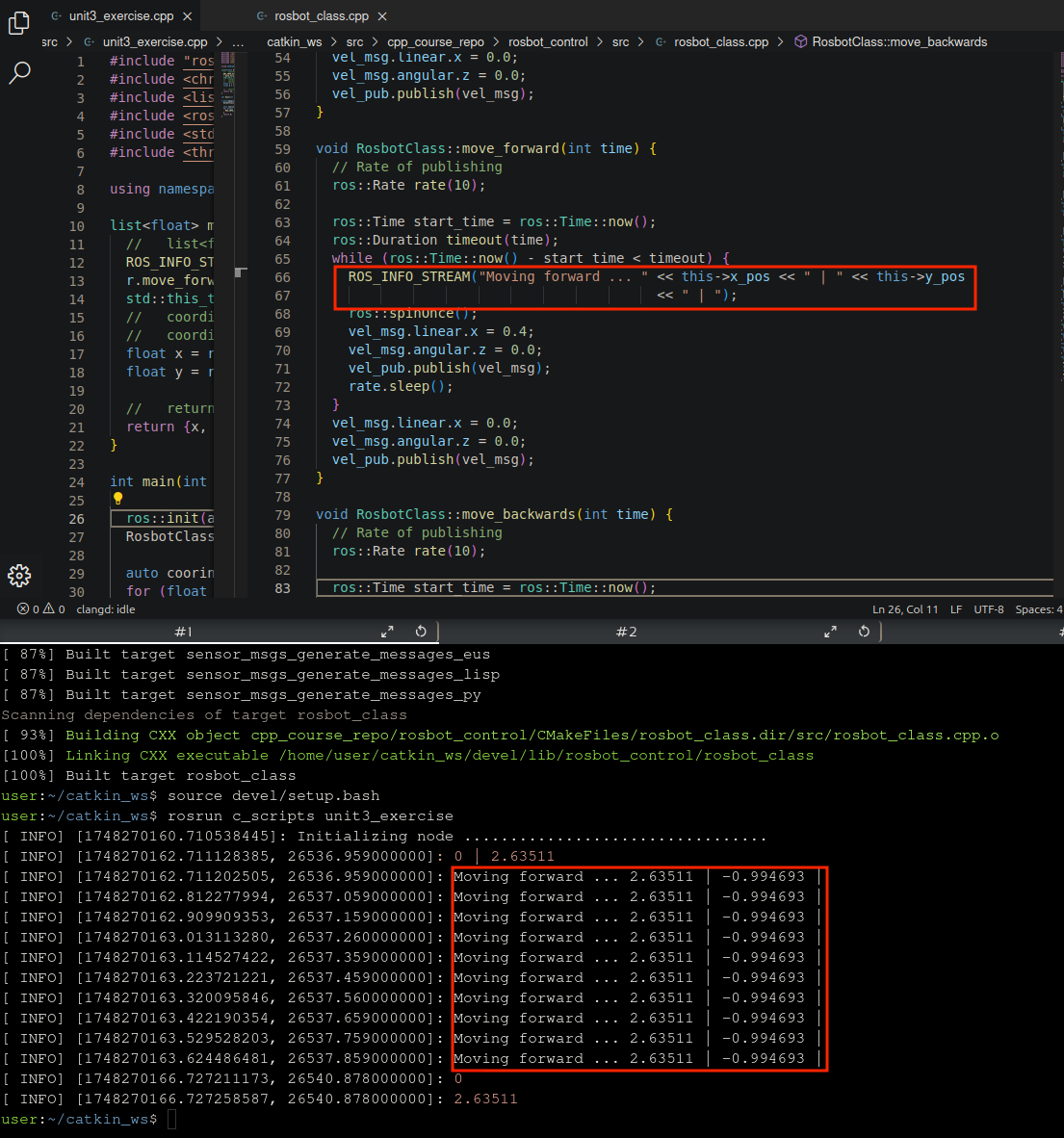
Is the base implementation is not done or am i doing anything wrong.
if so why does the exercise question says move and then update position.