I created the required file gmapping.launch in Exercise 1.1 c)
Then launched in shell #2 “rosrun rviz rviz -d rospack find teb_navigation_demo/rviz/teb.rviz”
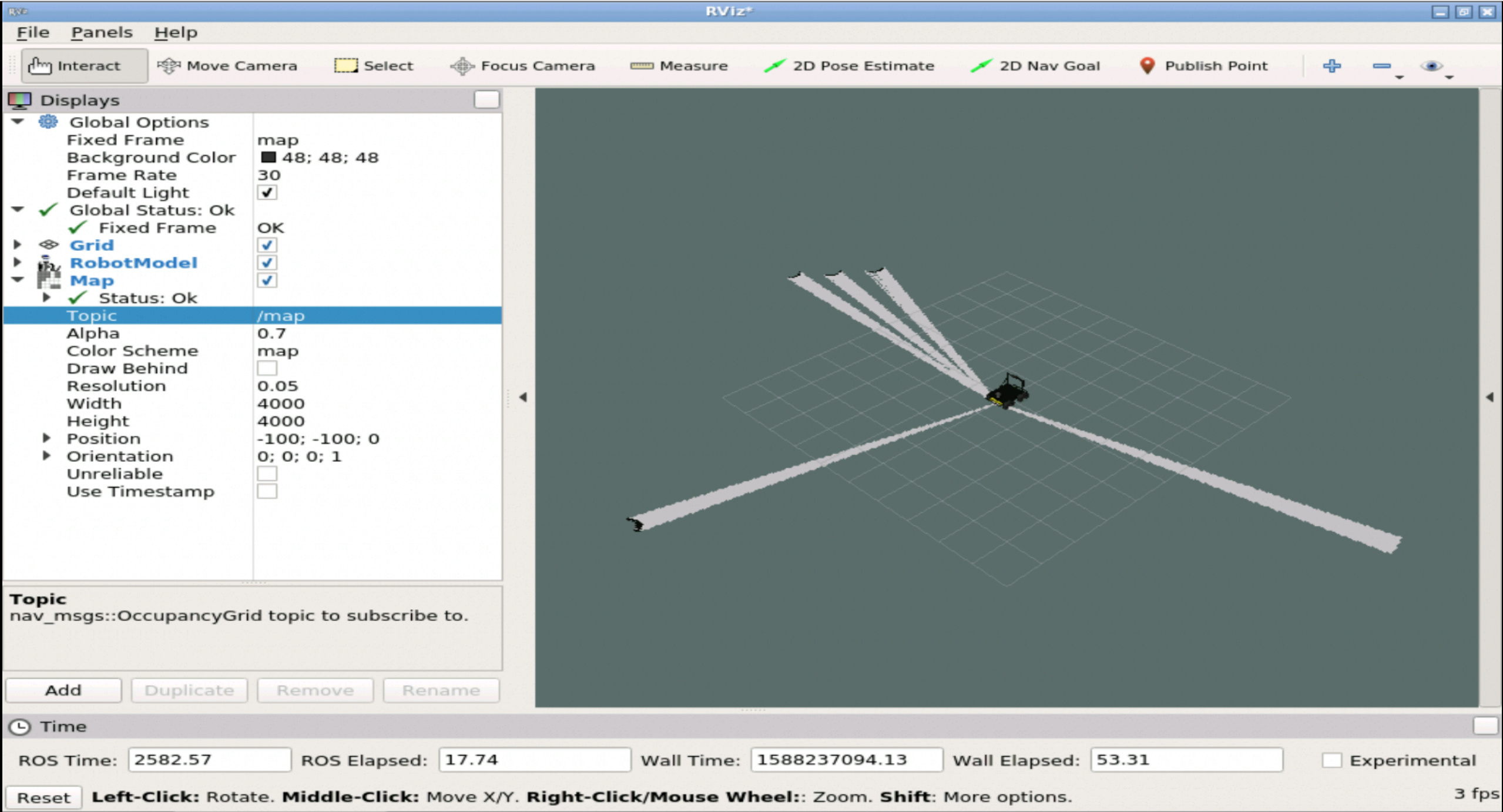
But I do not get the map as shown in section e).
The display has the robot in the middle but no scans. Can’t figure out what is wrong. Not sure I have the parameters of the display is set correct.
Please help to sort out this problem.