beginning scene:
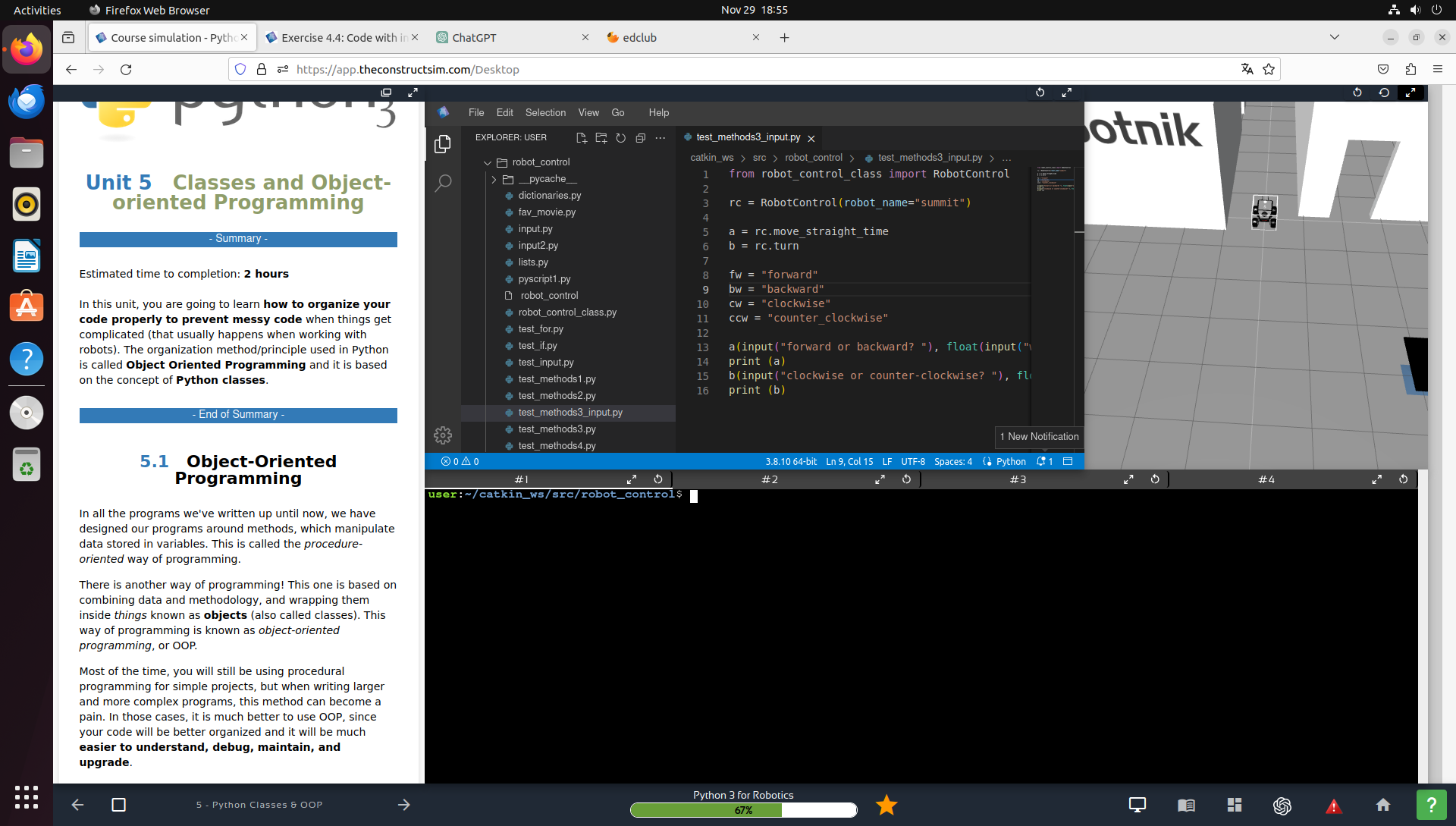
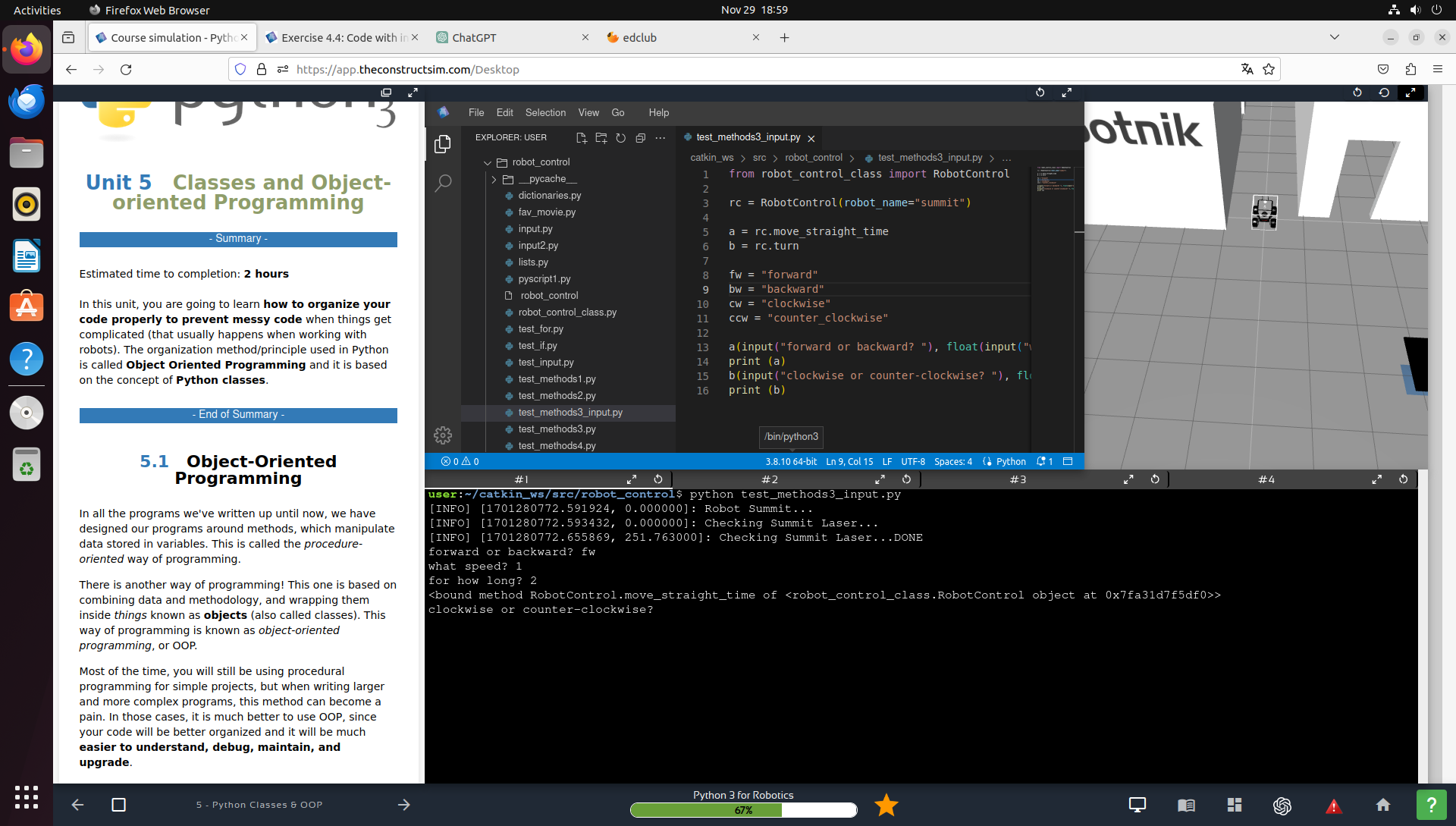
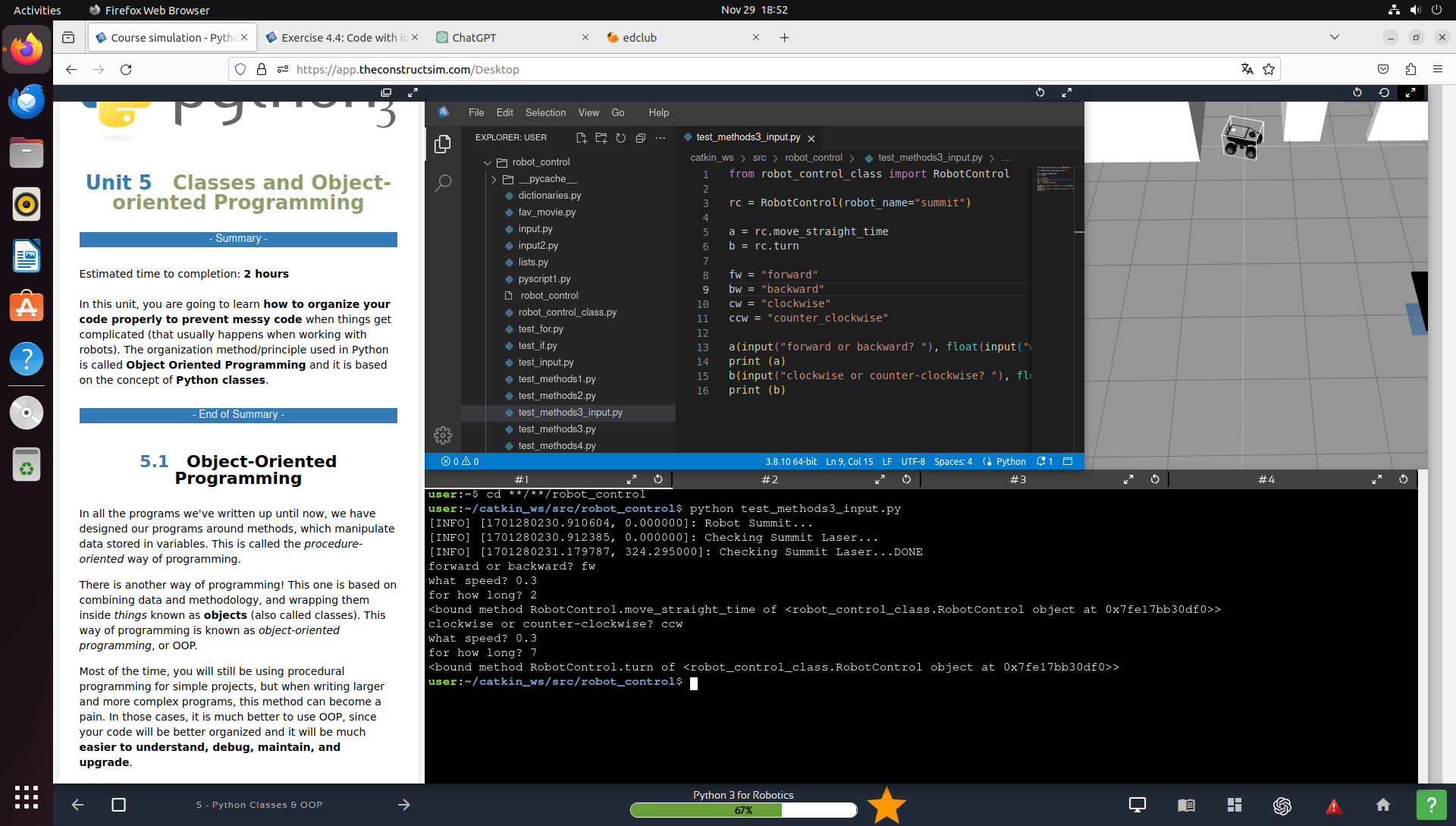
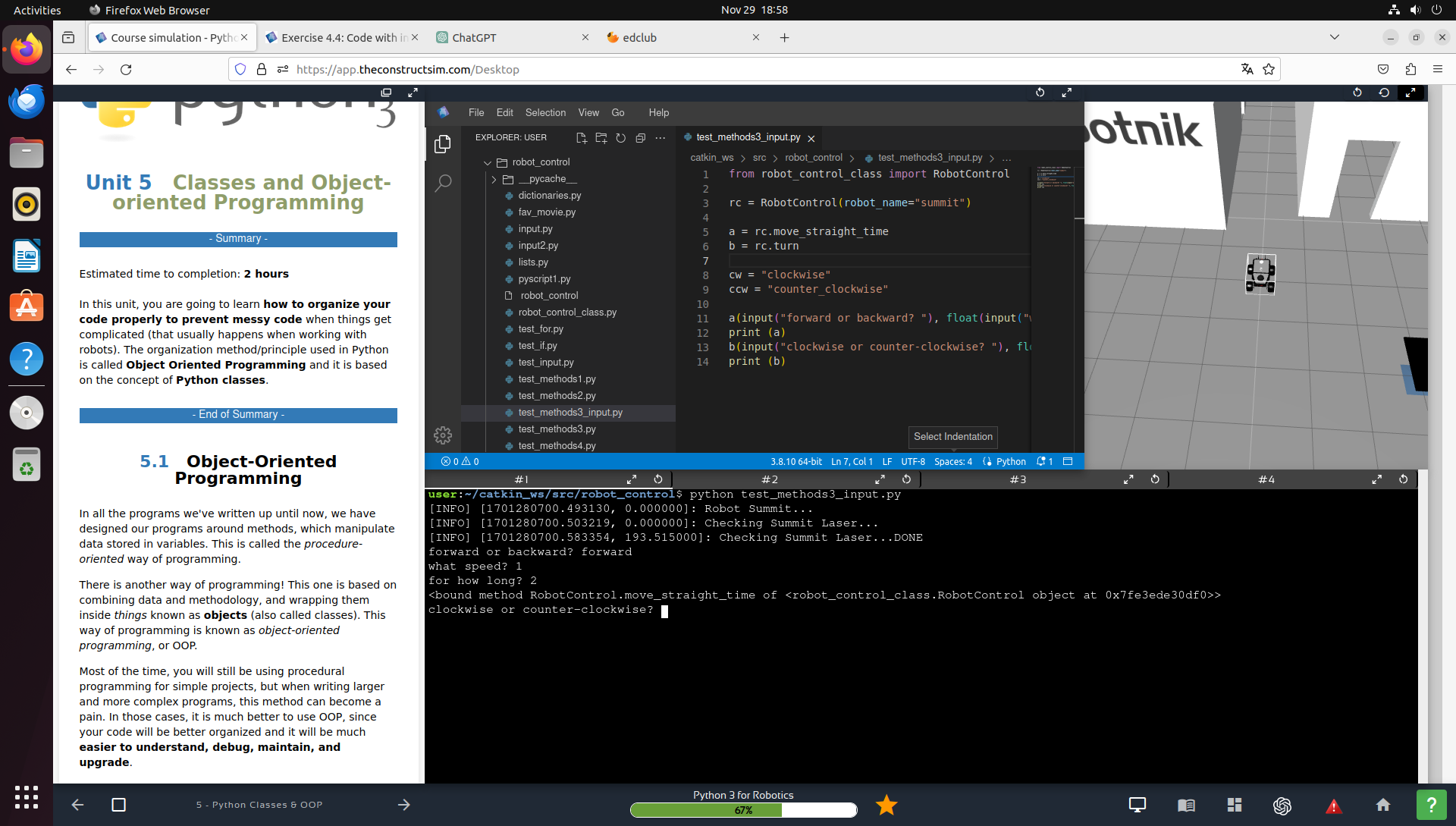
I launched the command with python test_methods3_input.py, the script above is saved in test_methods3_input.py . Pictures folow reply-by-reply, because I’m only allowed to post one picture at a time.
This is the code of the robot_control_class.py which includes the move_straight_time and the turn method. The complete code as well as the 2 methods seperately underneath:
move_straight_time
def move_straight_time(self, motion, speed, time):
# Initilize velocities
self.cmd.linear.y = 0
self.cmd.linear.z = 0
self.cmd.angular.x = 0
self.cmd.angular.y = 0
self.cmd.angular.z = 0
if motion == "forward":
self.cmd.linear.x = speed
elif motion == "backward":
self.cmd.linear.x = - speed
i = 0
# loop to publish the velocity estimate, current_distance = velocity * (t1 - t0)
while (i <= time):
# Publish the velocity
self.vel_publisher.publish(self.cmd)
i += 1
self.rate.sleep()
# set velocity to zero to stop the robot
self.stop_robot()
s = "Moved robot " + motion + " for " + str(time) + " seconds at " + str(speed) + " m/s"
return s
turn
def turn(self, clockwise, speed, time):
# Initilize velocities
self.cmd.linear.x = 0
self.cmd.linear.y = 0
self.cmd.linear.z = 0
self.cmd.angular.x = 0
self.cmd.angular.y = 0
if clockwise == "clockwise":
self.cmd.angular.z = -speed
else:
self.cmd.angular.z = speed
i = 0
# loop to publish the velocity estimate, current_distance = velocity * (t1 - t0)
while (i <= time):
# Publish the velocity
self.vel_publisher.publish(self.cmd)
i += 1
self.rate.sleep()
# set velocity to zero to stop the robot
self.stop_robot()
s = "Turned robot " + clockwise + " for " + str(time) + " seconds at " + str(speed) + " radians/second"
return s
robot_control_class.py
#!/usr/bin/env python
import rospy
from geometry_msgs.msg import Twist
from sensor_msgs.msg import LaserScan
import time
class RobotControl():
def __init__(self, robot_name="turtlebot"):
rospy.init_node('robot_control_node', anonymous=True)
if robot_name == "summit":
rospy.loginfo("Robot Summit...")
cmd_vel_topic = "/summit_xl_control/cmd_vel"
# We check that sensors are working
self._check_summit_laser_ready()
else:
rospy.loginfo("Robot Turtlebot...")
cmd_vel_topic='/cmd_vel'
self._check_laser_ready()
# We start the publisher
self.vel_publisher = rospy.Publisher(cmd_vel_topic, Twist, queue_size=1)
self.cmd = Twist()
self.laser_subscriber = rospy.Subscriber(
'/kobuki/laser/scan', LaserScan, self.laser_callback)
self.summit_laser_subscriber = rospy.Subscriber(
'/hokuyo_base/scan', LaserScan, self.summit_laser_callback)
self.ctrl_c = False
self.rate = rospy.Rate(1)
rospy.on_shutdown(self.shutdownhook)
def _check_summit_laser_ready(self):
self.summit_laser_msg = None
rospy.loginfo("Checking Summit Laser...")
while self.summit_laser_msg is None and not rospy.is_shutdown():
try:
self.summit_laser_msg = rospy.wait_for_message("/hokuyo_base/scan", LaserScan, timeout=1.0)
rospy.logdebug("Current /hokuyo_base/scan READY=>" + str(self.summit_laser_msg))
except:
rospy.logerr("Current /hokuyo_base/scan not ready yet, retrying for getting scan")
rospy.loginfo("Checking Summit Laser...DONE")
return self.summit_laser_msg
def _check_laser_ready(self):
self.laser_msg = None
rospy.loginfo("Checking Laser...")
while self.laser_msg is None and not rospy.is_shutdown():
try:
self.laser_msg = rospy.wait_for_message("/kobuki/laser/scan", LaserScan, timeout=1.0)
rospy.logdebug("Current /kobuki/laser/scan READY=>" + str(self.laser_msg))
except:
rospy.logerr("Current /kobuki/laser/scan not ready yet, retrying for getting scan")
rospy.loginfo("Checking Laser...DONE")
return self.laser_msg
def publish_once_in_cmd_vel(self):
"""
This is because publishing in topics sometimes fails the first time you publish.
In continuous publishing systems, this is no big deal, but in systems that publish only
once, it IS very important.
"""
while not self.ctrl_c:
connections = self.vel_publisher.get_num_connections()
if connections > 0:
self.vel_publisher.publish(self.cmd)
#rospy.loginfo("Cmd Published")
break
else:
self.rate.sleep()
def shutdownhook(self):
# works better than the rospy.is_shutdown()
self.ctrl_c = True
def laser_callback(self, msg):
self.laser_msg = msg
def summit_laser_callback(self, msg):
self.summit_laser_msg = msg
def get_laser(self, pos):
time.sleep(1)
return self.laser_msg.ranges[pos]
def get_laser_summit(self, pos):
time.sleep(1)
return self.summit_laser_msg.ranges[pos]
def get_front_laser(self):
time.sleep(1)
return self.laser_msg.ranges[360]
def get_laser_full(self):
time.sleep(1)
return self.laser_msg.ranges
def stop_robot(self):
#rospy.loginfo("shutdown time! Stop the robot")
self.cmd.linear.x = 0.0
self.cmd.angular.z = 0.0
self.publish_once_in_cmd_vel()
def move_straight(self):
# Initilize velocities
self.cmd.linear.x = 0.5
self.cmd.linear.y = 0
self.cmd.linear.z = 0
self.cmd.angular.x = 0
self.cmd.angular.y = 0
self.cmd.angular.z = 0
# Publish the velocity
self.publish_once_in_cmd_vel()
def move_straight_time(self, motion, speed, time):
# Initilize velocities
self.cmd.linear.y = 0
self.cmd.linear.z = 0
self.cmd.angular.x = 0
self.cmd.angular.y = 0
self.cmd.angular.z = 0
if motion == "forward":
self.cmd.linear.x = speed
elif motion == "backward":
self.cmd.linear.x = - speed
i = 0
# loop to publish the velocity estimate, current_distance = velocity * (t1 - t0)
while (i <= time):
# Publish the velocity
self.vel_publisher.publish(self.cmd)
i += 1
self.rate.sleep()
# set velocity to zero to stop the robot
self.stop_robot()
s = "Moved robot " + motion + " for " + str(time) + " seconds at " + str(speed) + " m/s"
return s
def turn(self, clockwise, speed, time):
# Initilize velocities
self.cmd.linear.x = 0
self.cmd.linear.y = 0
self.cmd.linear.z = 0
self.cmd.angular.x = 0
self.cmd.angular.y = 0
if clockwise == "clockwise":
self.cmd.angular.z = -speed
else:
self.cmd.angular.z = speed
i = 0
# loop to publish the velocity estimate, current_distance = velocity * (t1 - t0)
while (i <= time):
# Publish the velocity
self.vel_publisher.publish(self.cmd)
i += 1
self.rate.sleep()
# set velocity to zero to stop the robot
self.stop_robot()
s = "Turned robot " + clockwise + " for " + str(time) + " seconds at " + str(speed) + " radians/second"
return s
if __name__ == '__main__':
robotcontrol_object = RobotControl()
try:
robotcontrol_object.move_straight()
except rospy.ROSInterruptException:
pass