I copy the code as guidance for Exercise 5.3 and run:
-
Shell #1
cd ~/ros2_ws
colcon build --packages-select path_planner_server
source ~/ros2_ws/install/setup.bash
ros2 launch path_planner_server pathplanner.launch.py -
Shell #2
source ~/ros2_ws/install/setup.bash
source /home/simulations/ros2_sims_ws/install/setup.bash
rviz2 -d /home/user/ros2_ws/src/local_costmap_rviz_config.rviz
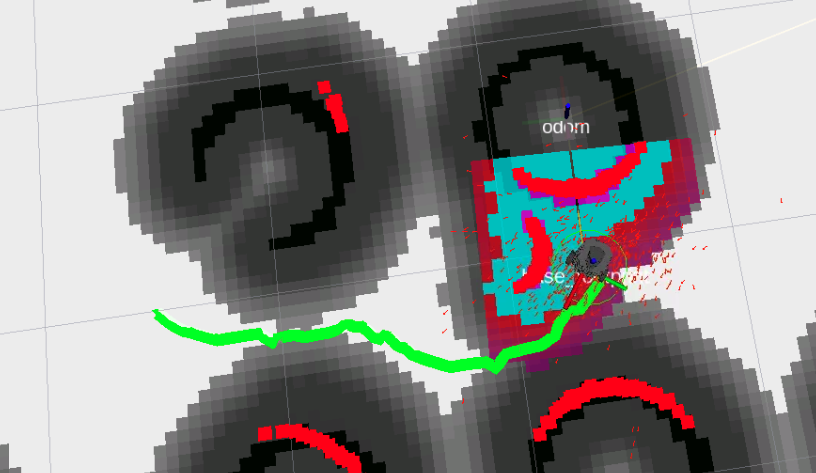
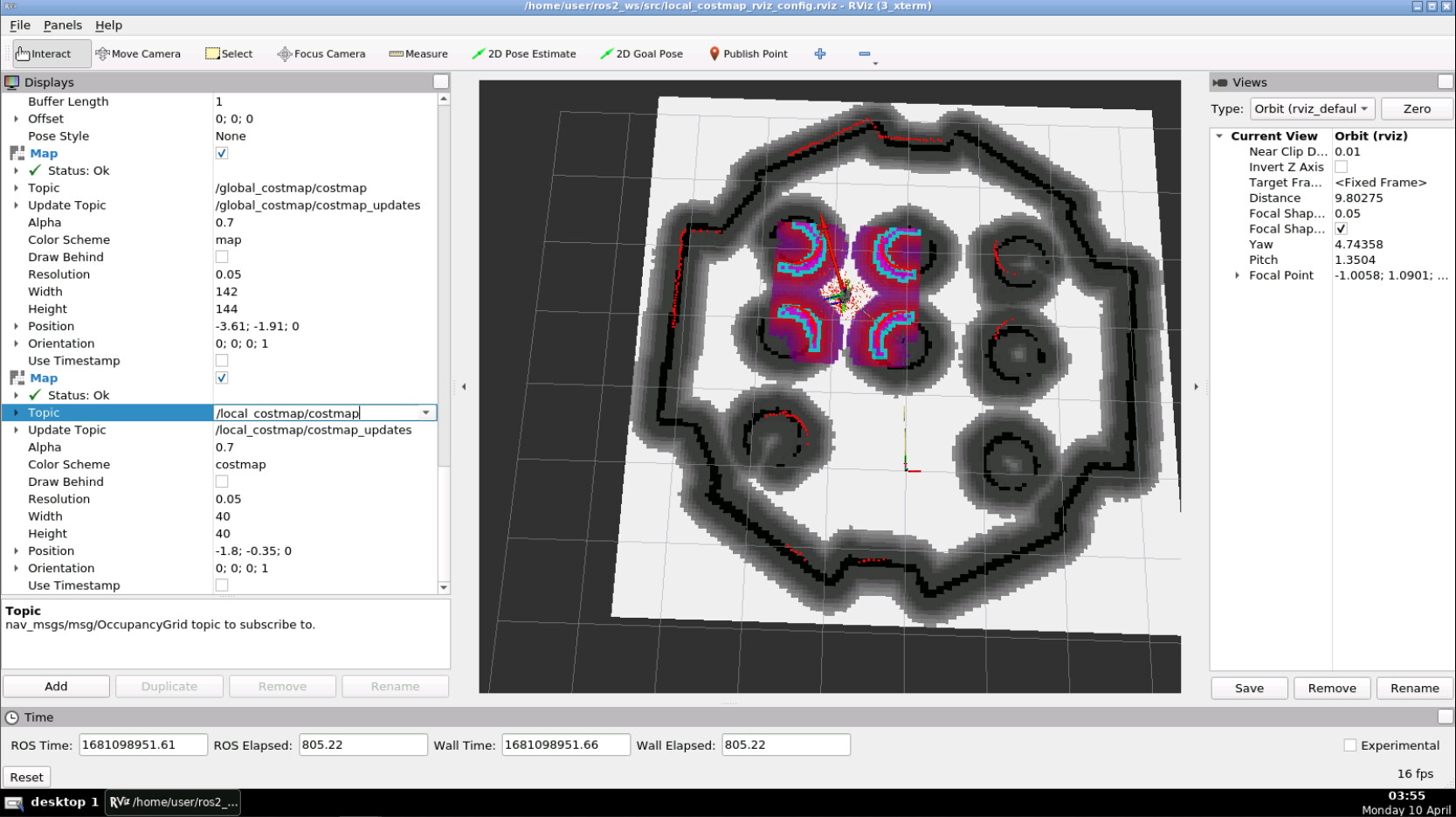
my Rviz looks like this:
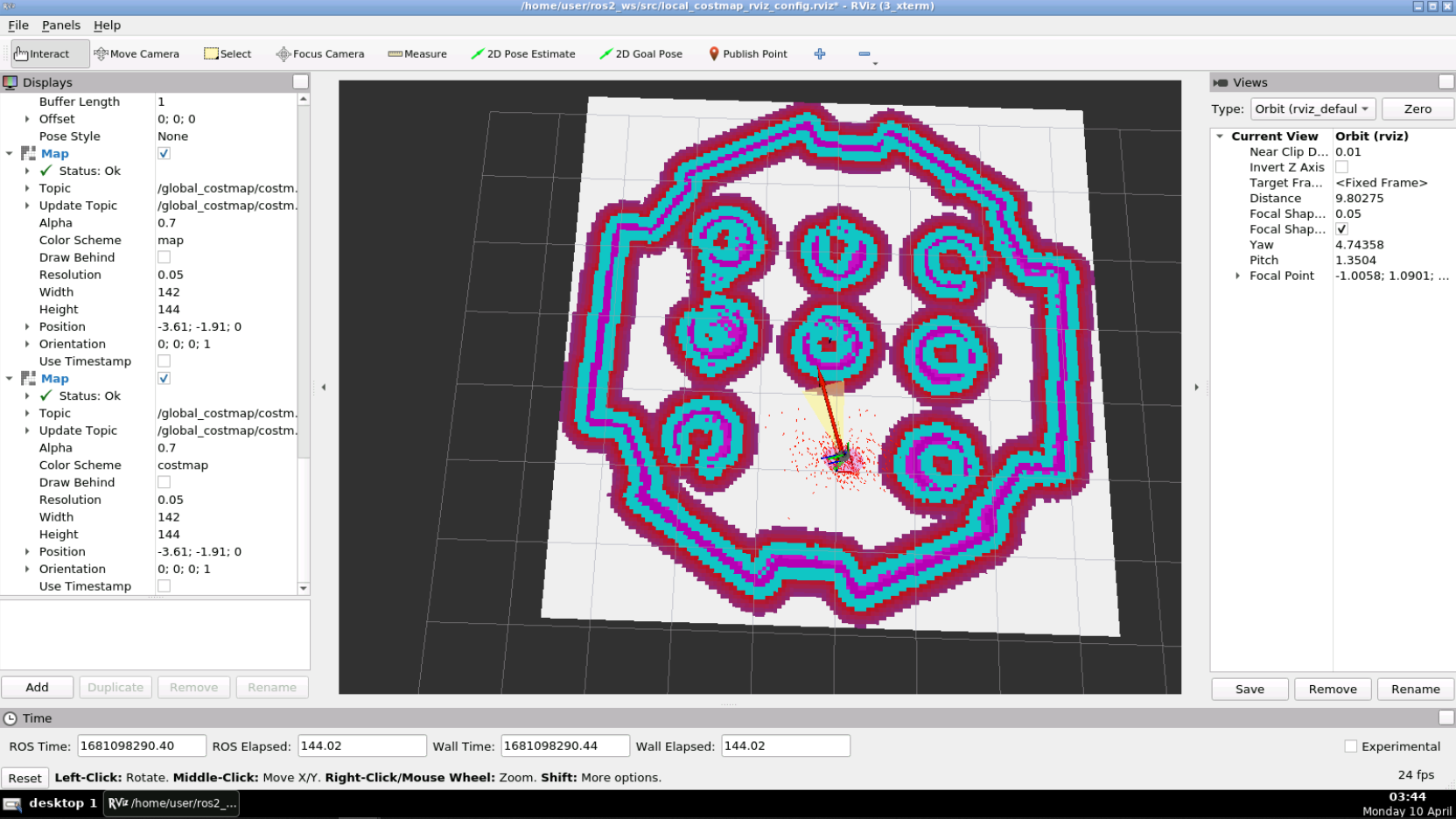
while it supposed to look like this: