So which one should we use? (that is your question)
The answer is… it depends. It depends on what are you doing with that information.
In the exercise, you are using the laser data. Hence, you need to reference the laser data to the frame of the sensor that is publishing it, not the other frame.
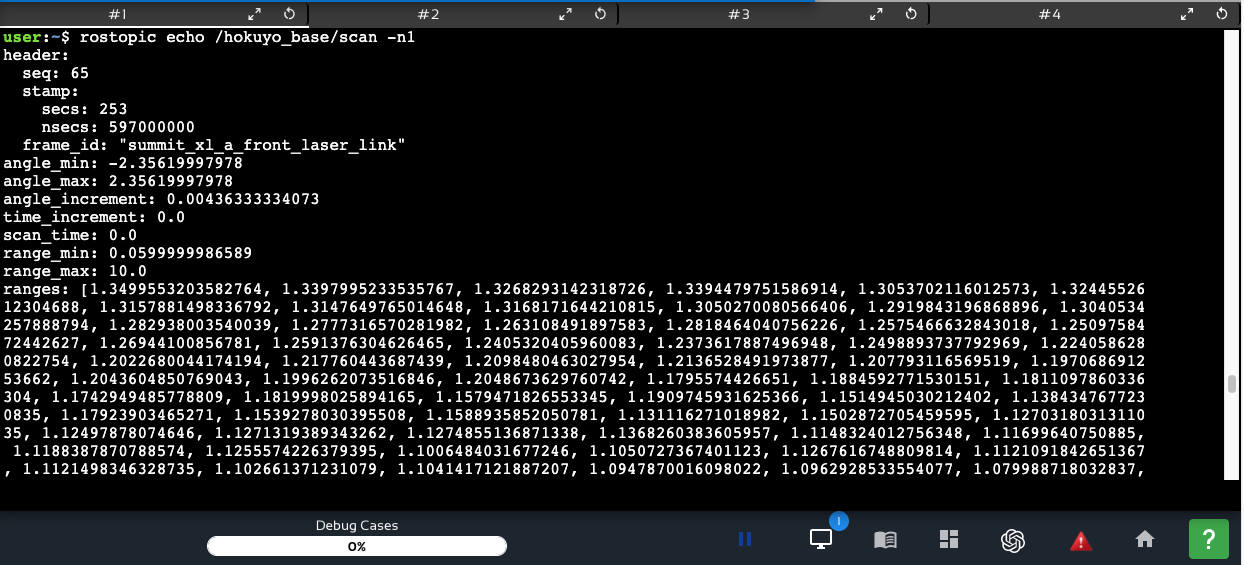
so how do you find which one is the frame in which the laser is publishing the data related to? By checking one laser message, which contains the info of the frame used:
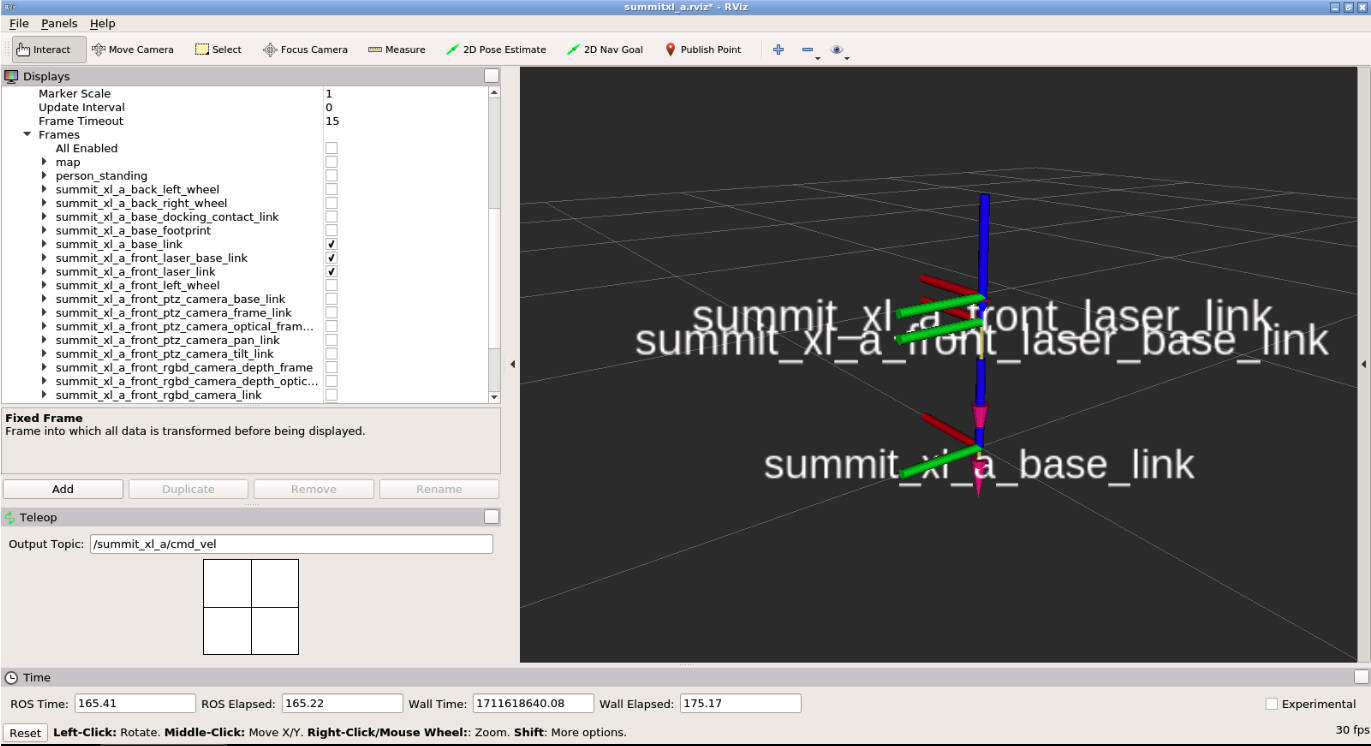
So as you can see in the picture, the laser is publishing laser data in the summit_xl_a_front_laser_link frame and that is why you should use that one.
For a different robot, you should follow the procedure I explained here to figure out which is the correct frame.