I’m currently working on the Linux Basics Real Robot Project.
Previously, I had some connection issues with the Real Robot Lab, which were resolved successfully.
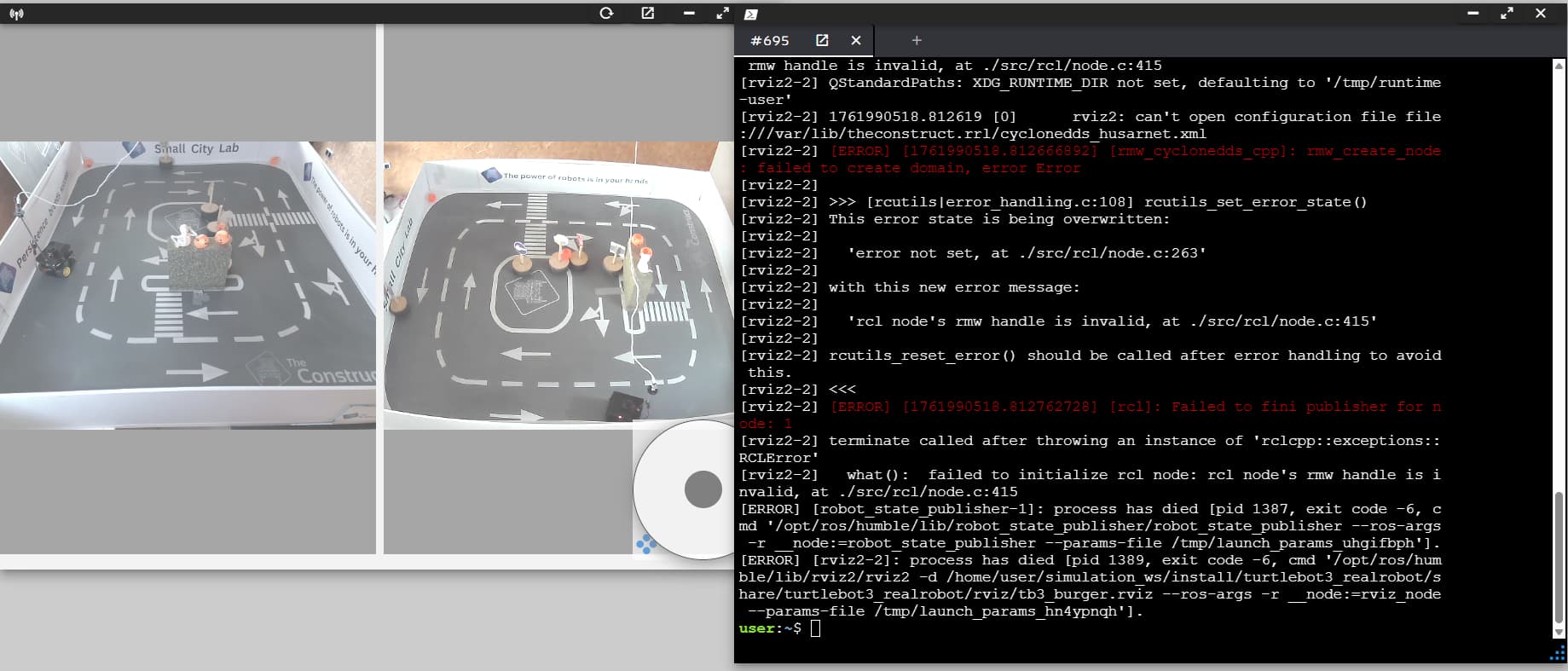
Now, I’m facing a new problem when I try to launch the Real Robot bringup program.
Hi @austinyeh, the command ros2 launch turtlebot3_realrobot main_turtlebot3_lab.launch.xml
launches a simulation. That’s why it’s located in ~/simulation_ws.
You don’t have to launch a simulation when connected to the real robot. The whole point of a simulation is to use it when you don’t have a real robot.
You need to run the program that makes the robot move. It’s probably a node you wrote. You can then open rviz manually and add all the components you want!
Thank you very much for your reply and for clarifying that the command ros2 launch turtlebot3_realrobot main_turtlebot3_lab.launch.xml
is actually intended for the simulation environment.
I would like to confirm the correct procedure when working with the Real Robot Lab,
since I have been strictly following the instructions provided in the Jupyter notebook.
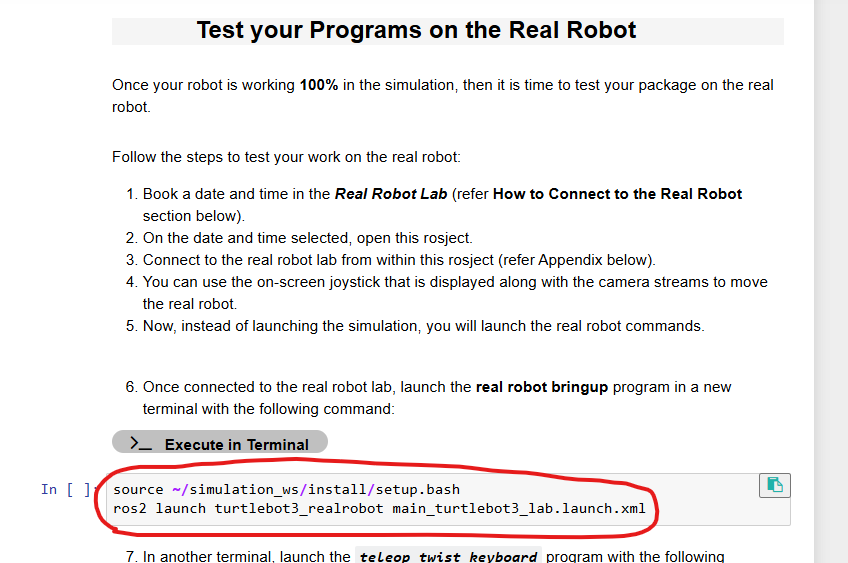
According to the current Jupyter guide under “Test your Programs on the Real Robot”,
the first step after connecting to the Real Robot Lab is to run:
However, based on your explanation, it seems that this step might only apply to the simulation and not to the real robot.
Could you please confirm whether this part of the Jupyter notebook might be outdated or contain an error?
It would be very helpful to know the exact first step to take after connecting to the Real Robot Lab —
for example, whether I should instead run:
user:~$ cat /etc/os-release
PRETTY_NAME=“Ubuntu 22.04.4 LTS”
NAME=“Ubuntu”
VERSION_ID=“22.04”
VERSION=“22.04.4 LTS (Jammy Jellyfish)”
VERSION_CODENAME=jammy
ID=ubuntu
ID_LIKE=debian
HOME_URL=“https ://www.ubuntu.com/”
SUPPORT_URL=“https ://help.ubuntu.com/”
BUG_REPORT_URL=“https ://bugs.launchpad.net/ubuntu/”
PRIVACY_POLICY_URL=“https://www.ubuntu.com/legal/terms-and-policies/privacy-policy”
UBUNTU_CODENAME=jammy
user:~$ cd simulation_ws/src/turtlebot3_ros2/turtlebot3_gazebo/launch
user:~/simulation_ws/src/turtlebot3_ros2/turtlebot3_gazebo/launch$ source /opt/ros/humble/setup.bash
user:~/simulation_ws/src/turtlebot3_ros2/turtlebot3_gazebo/launch$ ls -la
total 64
drwxr-xr-x 3 user user 4096 Nov 12 10:50 .
drwxr-xr-x 10 user user 4096 Nov 12 10:54 …
drwxr-xr-x 2 user user 4096 Nov 12 07:35 pycache
-rw-r–r-- 1 user user 2710 Feb 10 2025 empty_world.launch.py
-rw-r–r-- 1 user user 655 Feb 10 2025 main_turtlebot3_lab.launch.xml
-rw-r–r-- 1 user user 1939 Feb 10 2025 robot_state_publisher.launch.py
-rw-r–r-- 1 user user 1442 Feb 10 2025 rviz.launch.py
-rw-r–r-- 1 user user 2297 Feb 10 2025 spawn_turtlebot3.launch.py
-rw-r–r-- 1 user user 2817 Feb 10 2025 start_turtlebot3_world.launch.py
-rw-r–r-- 1 user user 685 Feb 10 2025 start_turtlebot3_world_standalone.launch.py
-rw-r–r-- 1 user user 2720 Feb 10 2025 turtlebot3_dqn_stage1.launch.py
-rw-r–r-- 1 user user 2720 Feb 10 2025 turtlebot3_dqn_stage2.launch.py
-rw-r–r-- 1 user user 2720 Feb 10 2025 turtlebot3_dqn_stage3.launch.py
-rw-r–r-- 1 user user 2720 Feb 10 2025 turtlebot3_dqn_stage4.launch.py
-rw-r–r-- 1 user user 2717 Feb 10 2025 turtlebot3_house.launch.py
-rw-r–r-- 1 user user 2717 Feb 10 2025 turtlebot3_world.launch.py
user:~/simulation_ws/src/turtlebot3_ros2/turtlebot3_gazebo/launch$ launch turtlebot3_gazebo main_turtlebot3_lab.launch.xml
bash: launch: command not found
user:~/simulation_ws/src/turtlebot3_ros2/turtlebot3_gazebo/launch$ ros launch turtlebot3_gazebo main_turtlebot3_lab.launch.xml
bash: ros: command not found
user:~/simulation_ws/src/turtlebot3_ros2/turtlebot3_gazebo/launch$ ros2 launch turtlebot3_gazebo main_turtlebot3_lab.launch.xml
file ‘main_turtlebot3_lab.launch.xml’ was not found in the share directory of package ‘turtlebot3_gazebo’ which is at’/opt/ros/humble/share/turtlebot3_gazebo’
user:~/simulation_ws/src/turtlebot3_ros2/turtlebot3_gazebo/launch$