When I submitted my files for assesment the first time, I had some issue with setup.py file. I fixed it and the assessment proceeded.
Second submission said that the robot did not move. but when i ran the package, the robot did move and it’s final position was in the required tolerance. I thought it was a bug… so, i submitted again.
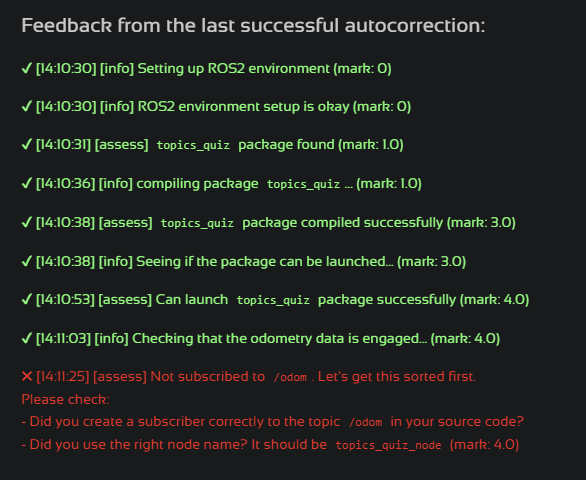
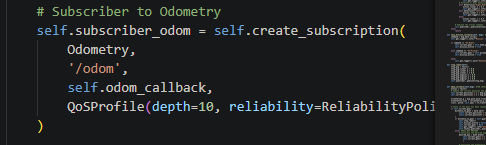
Third submission said that I am not subscribed to /odom topic well. which again does not make sense because the robot is moving from home to pickup and then coming back to pickup.
@kepitychiar82fc2591b962496f
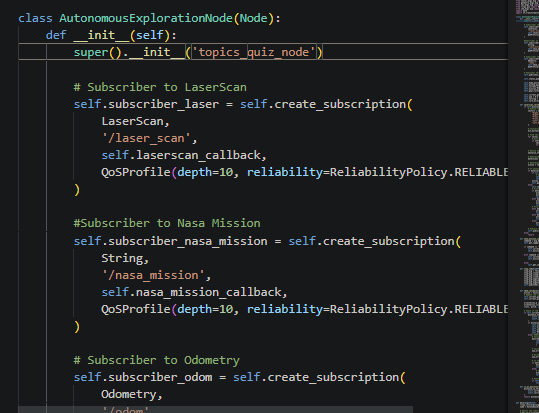
Did you check the “what you can check” feedback from the grader? It’s possible to fail the grading even if your code works, if you did not name the files as specified.
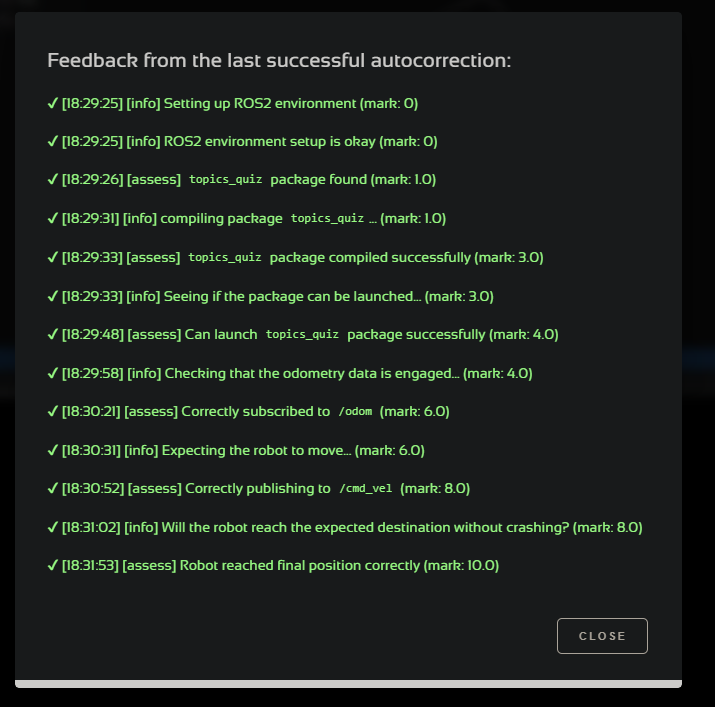
I had to reset the simulaiton world and all terminals. I also removed colcon cache and killed all ros2 processes.
started it all again and submitted my quiz.