Goodday! I am currently stuck on my final project in the ros manipulation module.
When I try to plan a path, it failes. The error message in the shell in which I launched the demo.launch file is:
[ INFO] [1747919975.912032455, 272.821000000]: ParallelPlan::solve(): Solution found by one or more threads in 5.060675 seconds
[ WARN] [1747919975.912123805, 272.821000000]: Computed solution is approximate
[ INFO] [1747919975.912158931, 272.821000000]: Unable to solve the planning problem
[ WARN] [1747919975.933766557, 272.842000000]: Fail: ABORTED: No motion plan found. No execution attempted.
I did not make any changes yet to the ros_controllers.yaml file.
I did make a change to the trajectory_execution.launch.xml file which is asked to do in the notebook.
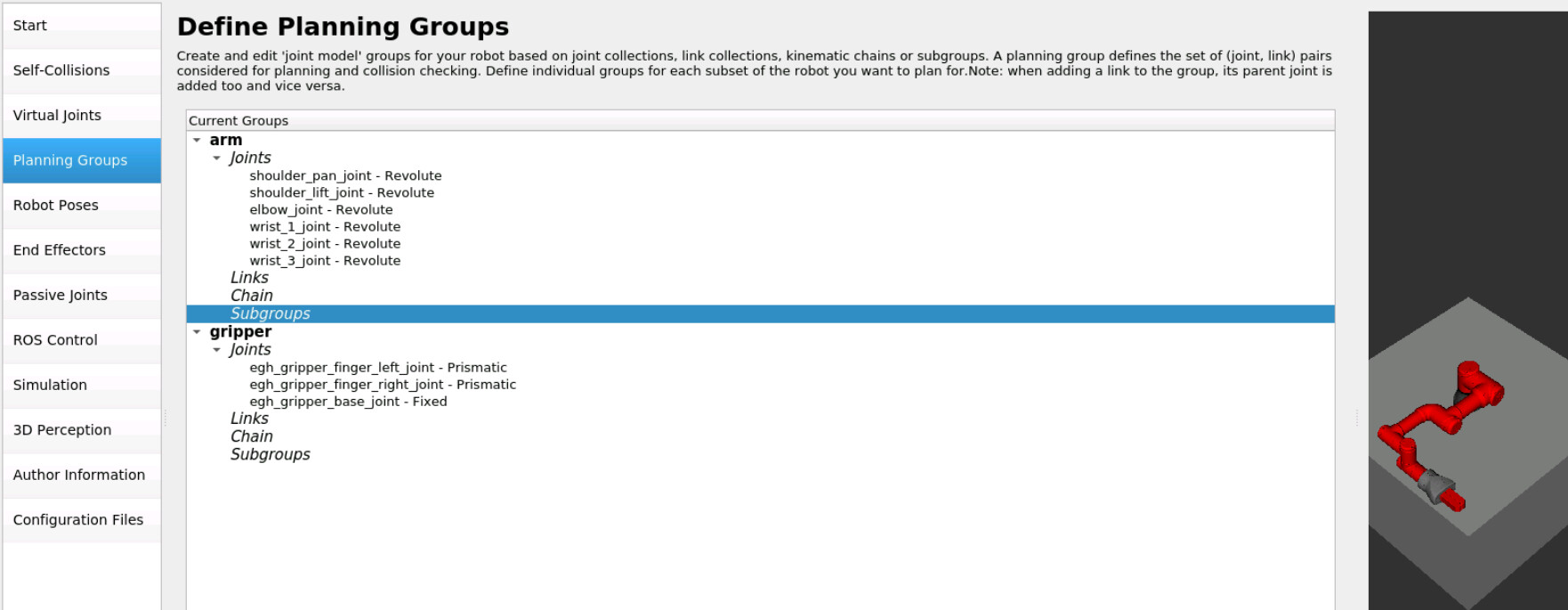
My planning groups are as follows
I hope the topic is clear, and the solution is easy to find. If not i’m sorry this is my first topic submit.
Thanks in advance!