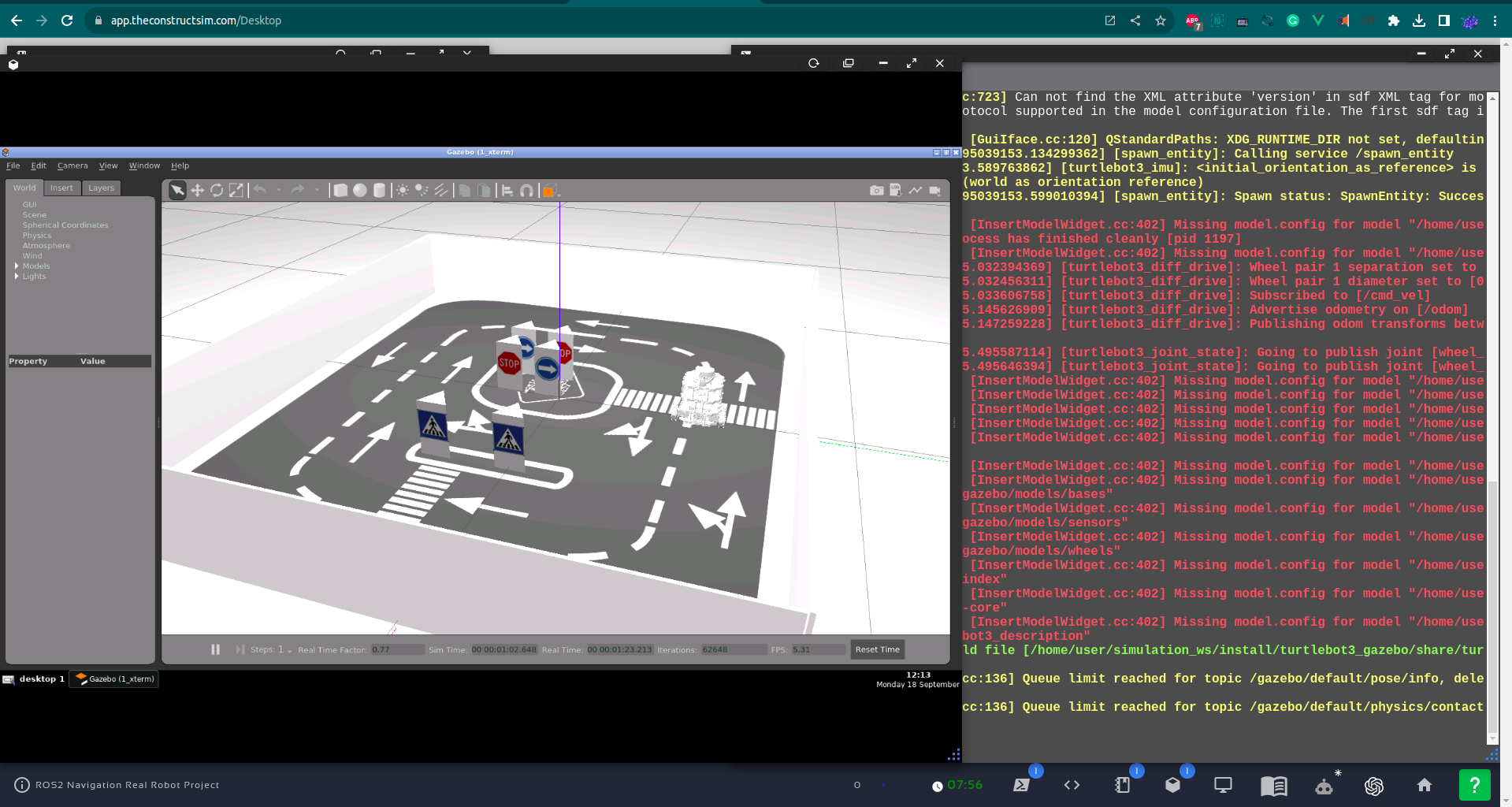
At the moment of Starting the simulation of Section 1 in the ROS2 navigation project, these errors are shown:
[gzclient --verbose -2] [Err] [InsertModelWidget.cc:402] Missing model.config for model “/home/user/.gazebo/models/RubberDucky”
[gzclient --verbose -2] [Err] [InsertModelWidget.cc:402] Missing model.config for model “/home/user/.gazebo/models/bases”
[gzclient --verbose -2] [Err] [InsertModelWidget.cc:402] Missing model.config for model “/home/user/.gazebo/models/lms1xx”
[gzclient --verbose -2] [Err] [InsertModelWidget.cc:402] Missing model.config for model “/home/user/.gazebo/models/media”
[gzclient --verbose -2] [Err] [InsertModelWidget.cc:402] Missing model.config for model “/home/user/.gazebo/models/meshes”
[gzclient --verbose -2] [Err] [InsertModelWidget.cc:402] Missing model.config for model “/home/user/.gazebo/models/sensors”
In addition, the ros2_bridge does not work, after reading the Girish recomendation, this is the terminal output:
he parameter ‘topics’ either doesn’t exist or isn’t an array
The parameter ‘services_1_to_2’ either doesn’t exist or isn’t an array
The parameter ‘services_2_to_1’ either doesn’t exist or isn’t an array
Please help, otherwise I can not continue with the project.