Hi,
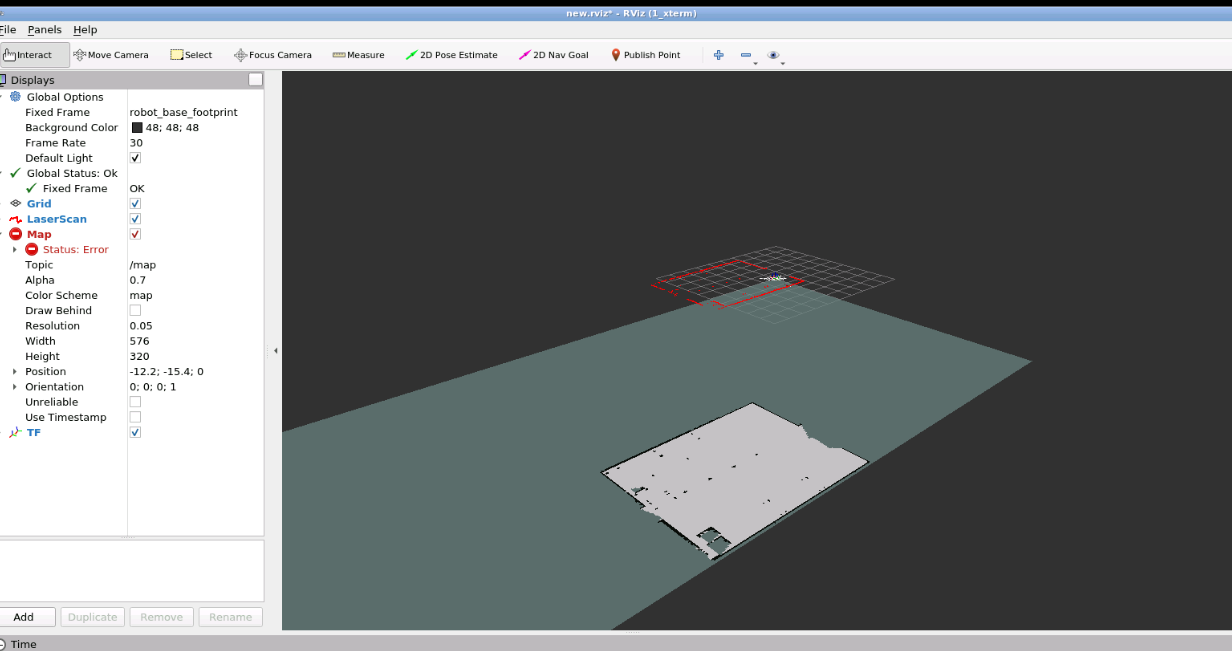
I am working on navigation project in warehouse. I saved the map after moving the robot to loading position, after that I closed the gmapping node and regenerated map using map_server. The generated map is placed outside the warehouse.
Hi,
I am working on navigation project in warehouse. I saved the map after moving the robot to loading position, after that I closed the gmapping node and regenerated map using map_server. The generated map is placed outside the warehouse.
Hi @gat.vab ,
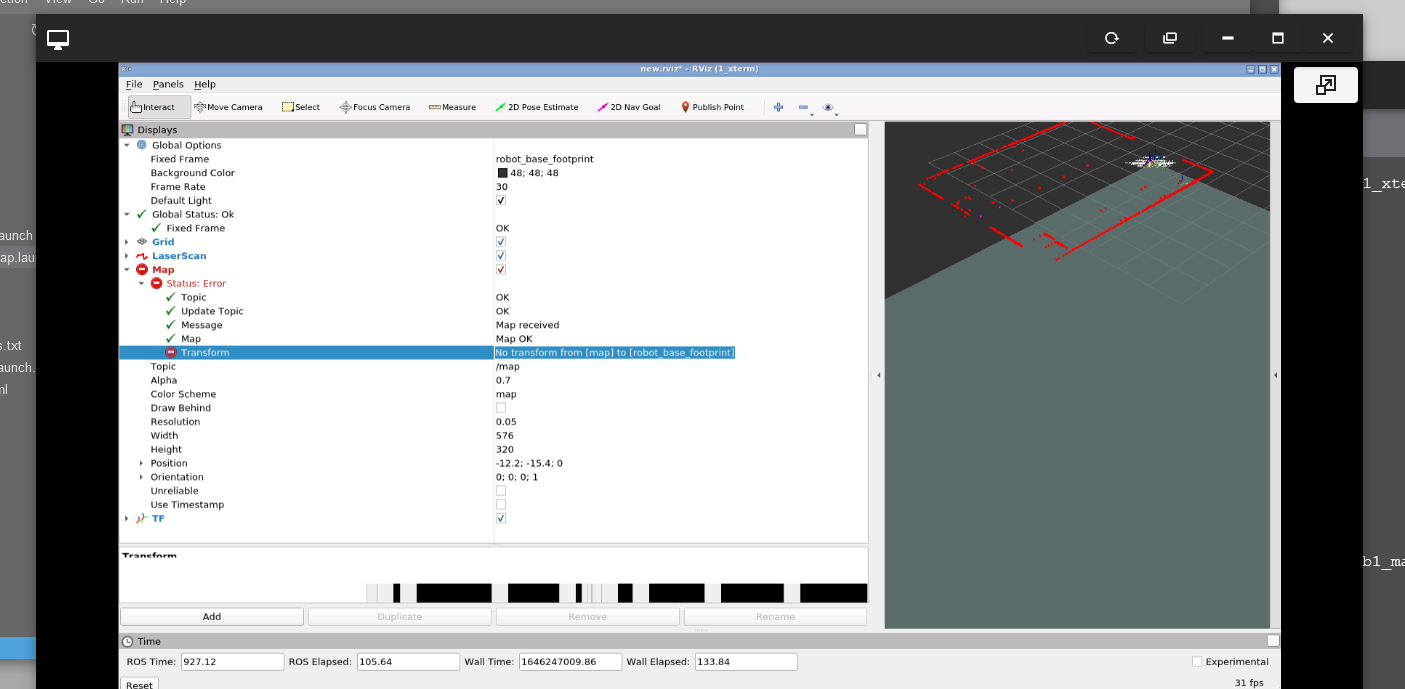
I noticed there is an error in the Map configuration in RViz. Could you expand and share what is the message error?
error is : No transform from [map] to [robot_base_footprint]
Also I was wondering do I need to set fixed frame to map?
Hello @gat.vab ,
It is normal that you see the map displaced because at this point the map frame is not related to the robot through any transform. The amcl node is the one that creates the transform from the map frame to the odom frame (and therefore to other robot frames such as robot_base_footprint). So, you need to start the amcl node in order to have this transform published.