Hi I was trying to use the gmapping slam node to generate a map. However my car model uses a point cloud data from laser scan which is not compatible to be imported by gmapping node. I have downloaded the “point-cloud-to-laserscan” pkg. However I did not comprehend how can I use this after my urdf spawning in Gazebo and before activating the gmapping node. I mean, as a bridge…In fact this node is prepared to subscribe this point cloud data and convert / publish through other topic the converted 2D laser scan data. So maybe I need to subscribe in the gmapping parameters node this new topic c which was converted right? And launch this convertion node with the gmapping launch file. Do you think this will work? Or is it better search for a new gmapping program which uses point cloud data if exist???
I suppose you answered yourself here: POST
Am I right? Or do you need some info on that topic?
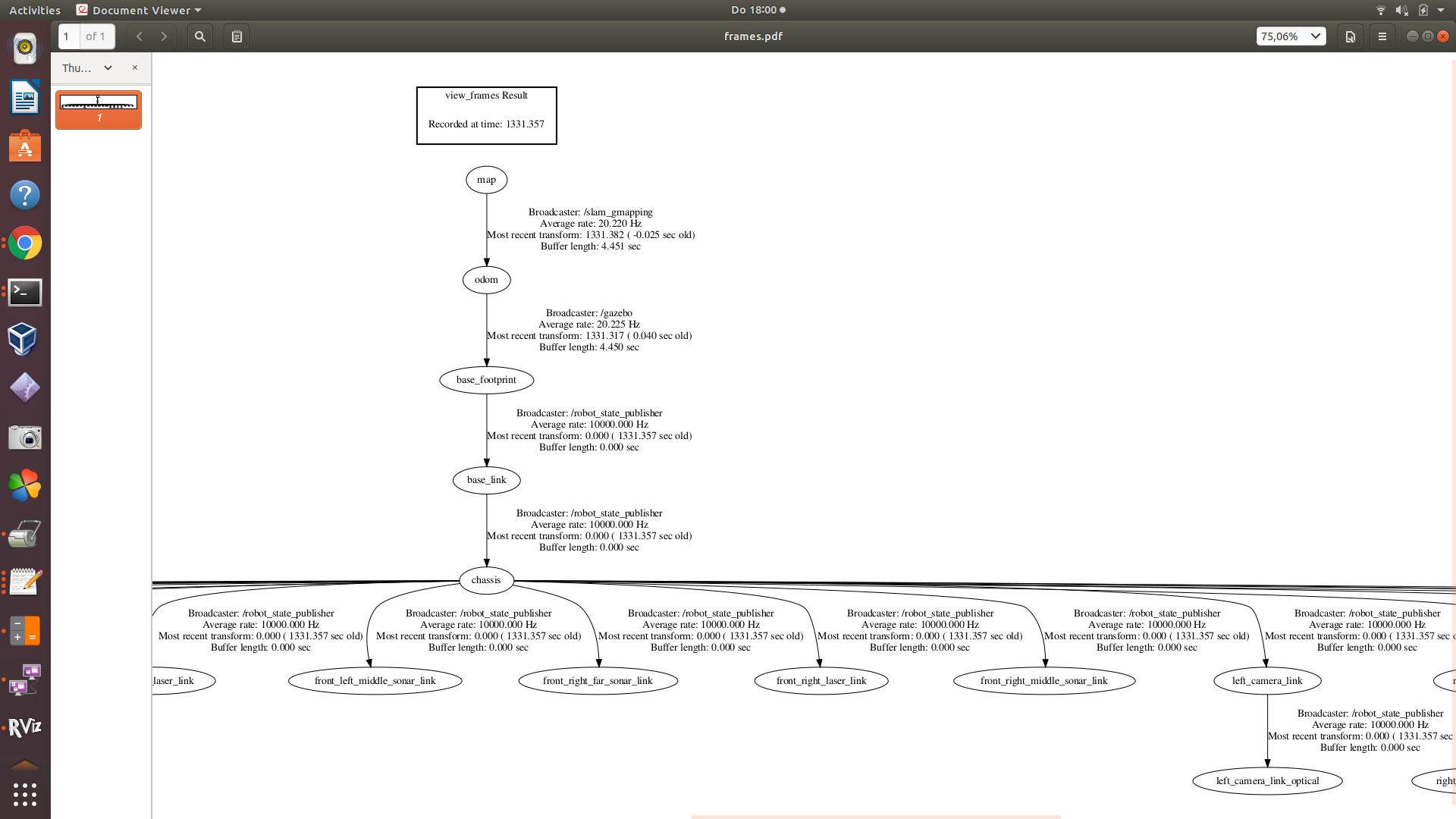
Yes I used the package which convert point cloud to laser scan and this warning error stopped. However as I have written I am facing an odometry problem, which I think is regarding a Transform that did not happen automatically between my laser sensor and the odom frame ( I imagined that this would occur automatically). I runned rostopic echo Tf…and I realized that the odom to map frame is done, the base_footprint to odom is done…however I did not see a conversion of the laser_scan to base_link or something similar…
What I mean to say is…there are Tf just of physical links …I could not observe sensors transform to this pyschical car components links (ANd Prius has a lot of sensors…) Should I generate this sensor-car physic components transform? Through a static transform in launch file, for example? OR should I stop trying to use the diff_drive plugin and use the ackermann as you told me?
Sorry I have exactly now generated the tree again, and visually shows the transform is happening, instead of the echo in TF does not show this.