Hi Community
I am currently doing the OpenCV Course and I am testing something with the HogDescriptor PeopleDetector().
I did the exercise 3.5 and with the example image it works fine.
Now I am testing the same with some other images.
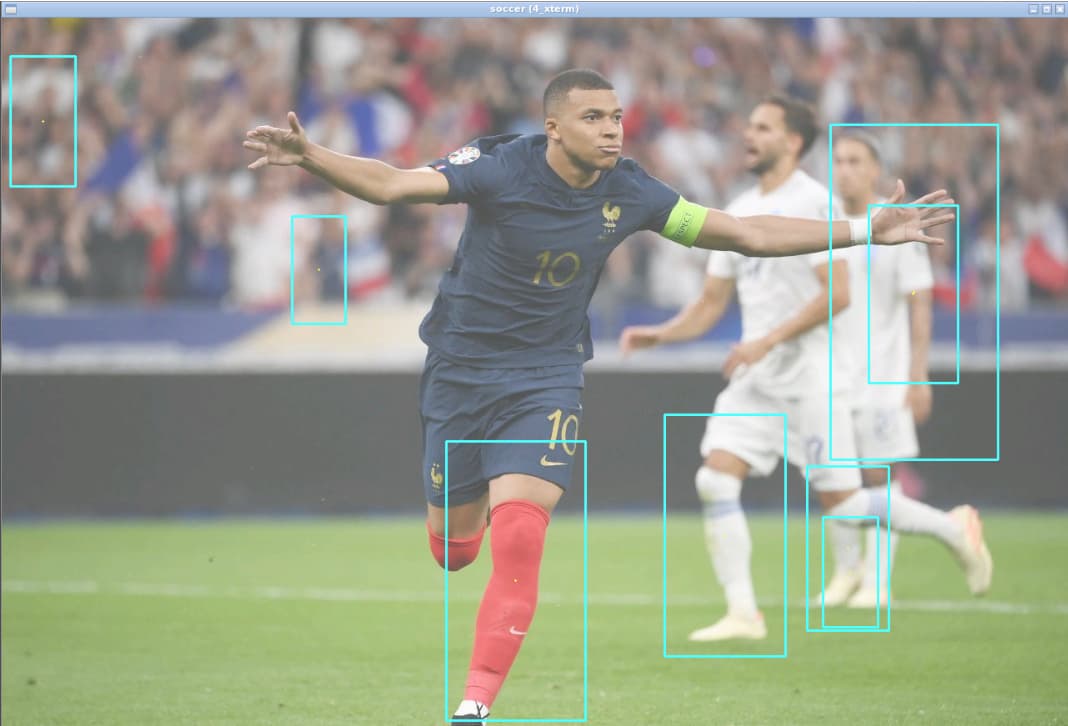
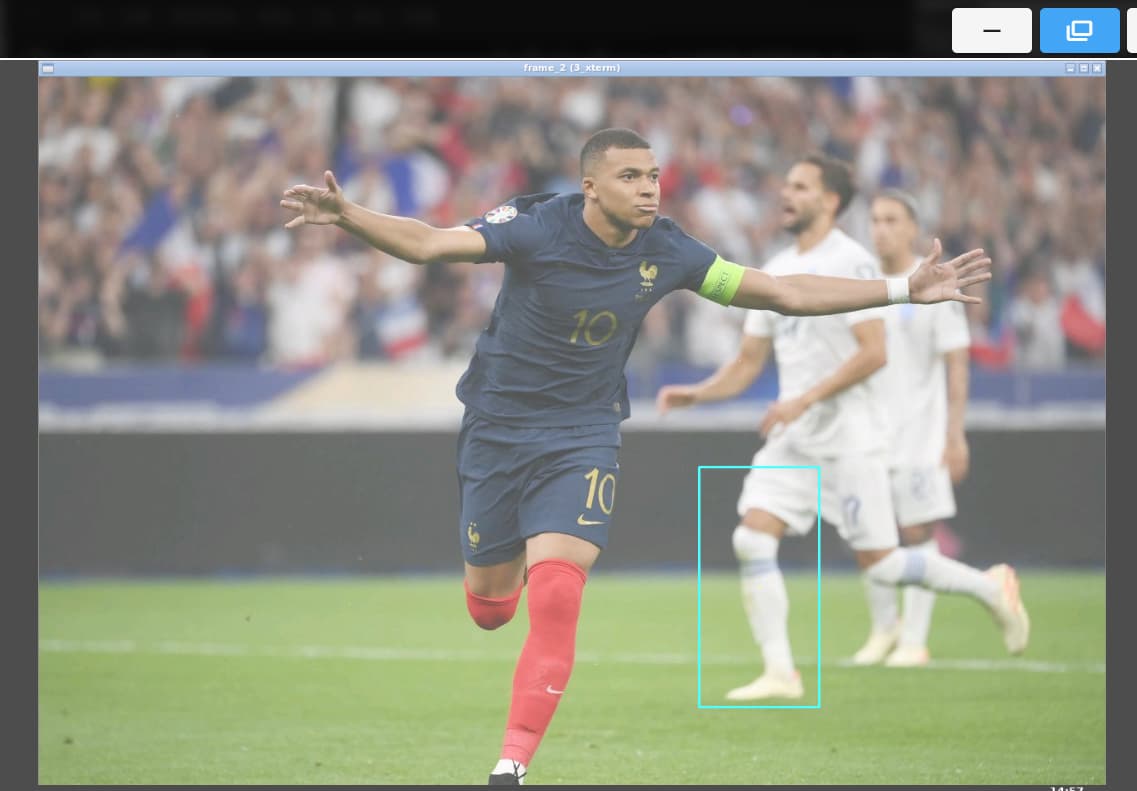
But with these images it does not detect correctly.


As far as I am concerned, the only parameters I can change are winStride, padding and scale, as well as the resize of the image.
I tried with different combinations of parameters, but I don’t get satisfying results. Does somebody know how to make the algorithm better, such that it detects the players correclty?
Here my code:
{
#!/usr/bin/env python
import rospy
from sensor_msgs.msg import Image
from cv_bridge import CvBridge, CvBridgeError
import cv2
import numpy as np
class LoadPeople(object):
def __init__(self):
self.image_sub = rospy.Subscriber("/camera/rgb/image_raw",Image,self.camera_callback)
self.bridge_object = CvBridge()
def camera_callback(self,data):
try:
# We select bgr8 because its the OpenCV encoding by default
cv_image = self.bridge_object.imgmsg_to_cv2(data, desired_encoding="bgr8")
except CvBridgeError as e:
print(e)
hog = cv2.HOGDescriptor()
#We set the hog descriptor as a People detector
hog.setSVMDetector(cv2.HOGDescriptor_getDefaultPeopleDetector())
img_nr = 1
if img_nr == 1:
img = cv2.imread('/home/user/catkin_ws/src/unit3_exercises/mbappe.jpg')
#resize
imX = 1280
imY = 921
img = cv2.resize(img,(imX,imY))
else :
img = cv2.imread('/home/user/catkin_ws/src/unit3_exercises/mancity.jpg')
#resize
imX = 1400
imY = 920
img = cv2.resize(img,(imX,imY))
#Hog
boxes, weights = hog.detectMultiScale(img, winStride=(2, 2),padding=(8, 8), scale=1.01)
boxes = np.array([[x, y, x + w, y + h] for (x, y, w, h) in boxes])
for (xA, yA, xB, yB) in boxes:
#Center in X
medX = xB - xA
xC = int(xA+(medX/2))
#Center in Y
medY = yB - yA
yC = int(yA+(medY/2))
#Draw a circle in the center of the box
cv2.circle(img,(xC,yC), 1, (0,255,255), -1)
# display the detected boxes in the original picture
cv2.rectangle(img, (xA, yA), (xB, yB),
(255, 255, 0), 2)
cv2.imshow('soccer',img)
cv2.waitKey(1)
def main():
load_people_object = LoadPeople()
rospy.init_node(‘load_people_node’, anonymous=True)
try:
rospy.spin()
except KeyboardInterrupt:
print(“Shutting down”)
cv2.destroyAllWindows()
if name == ‘main’:
main()
}
Thanks in advance for any help