I watched this video in ROS1 and want to deloy in ROS2: https://youtu.be/b7lUBZCZycg
So, I don’t know if there is a package that performs this function. Or if not, what do I need to do to get it in ROS2
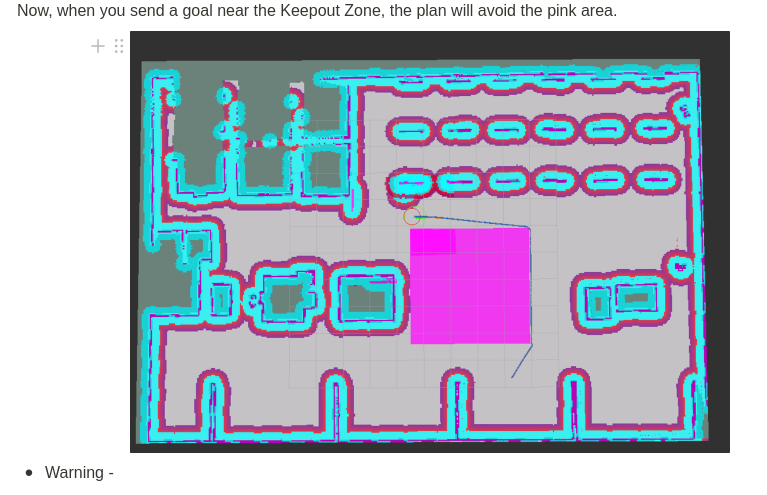
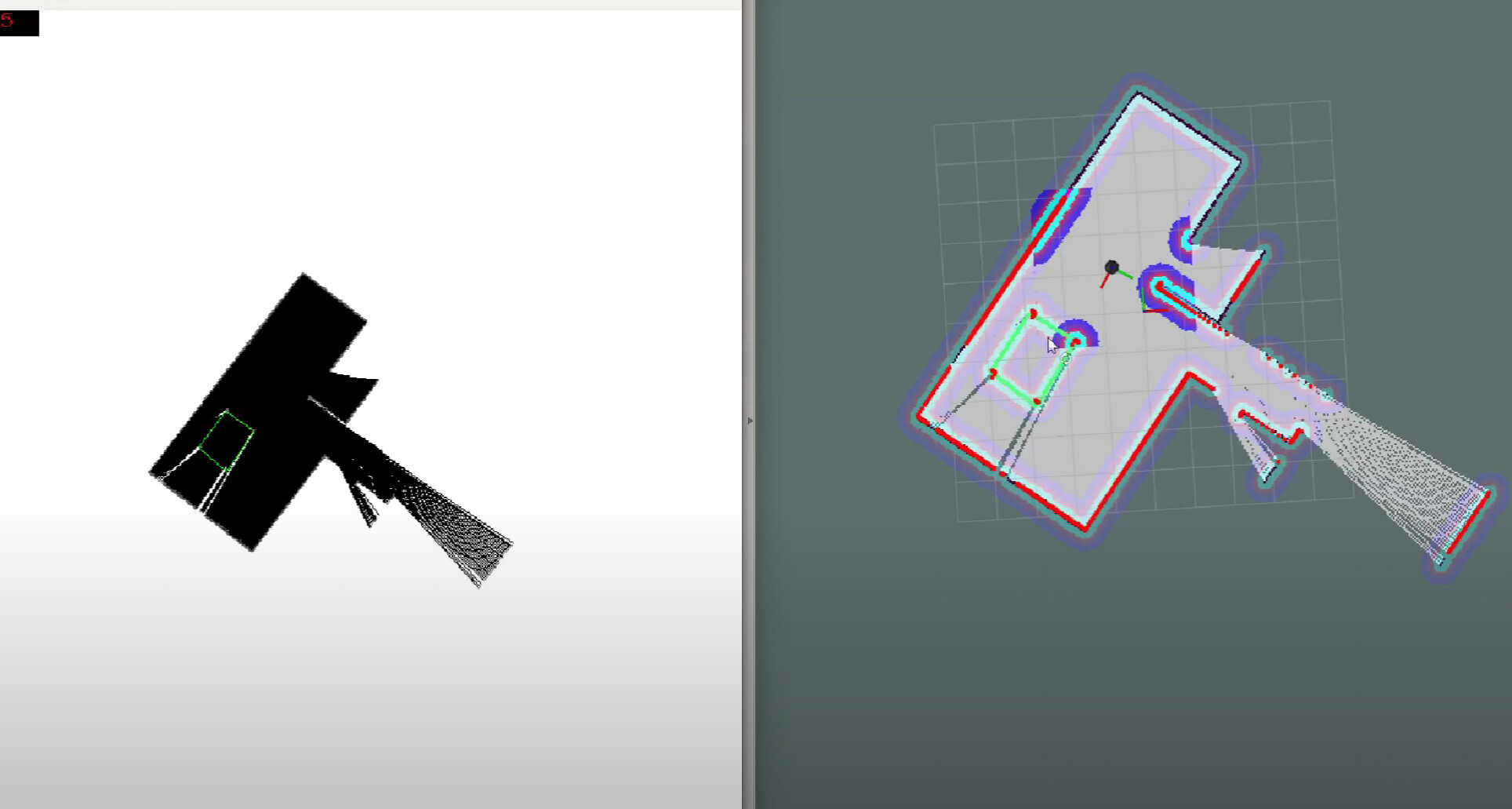
Thank you, I followed what was done in the Advanced Nav2 course. But is there any way to edit the realtime costmap as shown below with ROS2? I’m thinking about writing a package but don’t know where to start. Can you suggest me some ideals or packages?