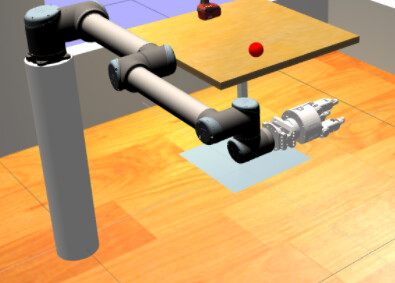
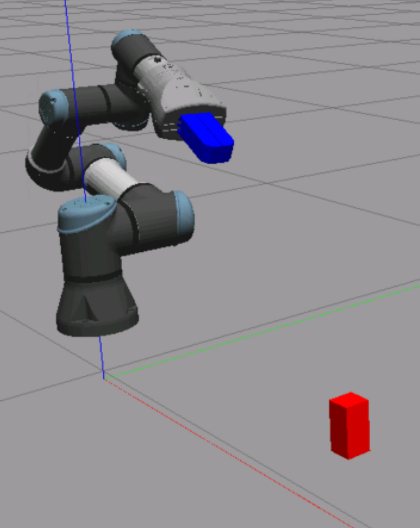
For a UR5, I’d like to know how to change the end effector. I’m taking the ROS Manipulation course right now. I wanted to know how to switch the end effector of a UR5 robot with a smart grasper from Unit 1 to the end effector of a UR3e robot in the last unit, which is a project. I have attached the following pictures for reference. I would greatly appreciate any help! Thank you!