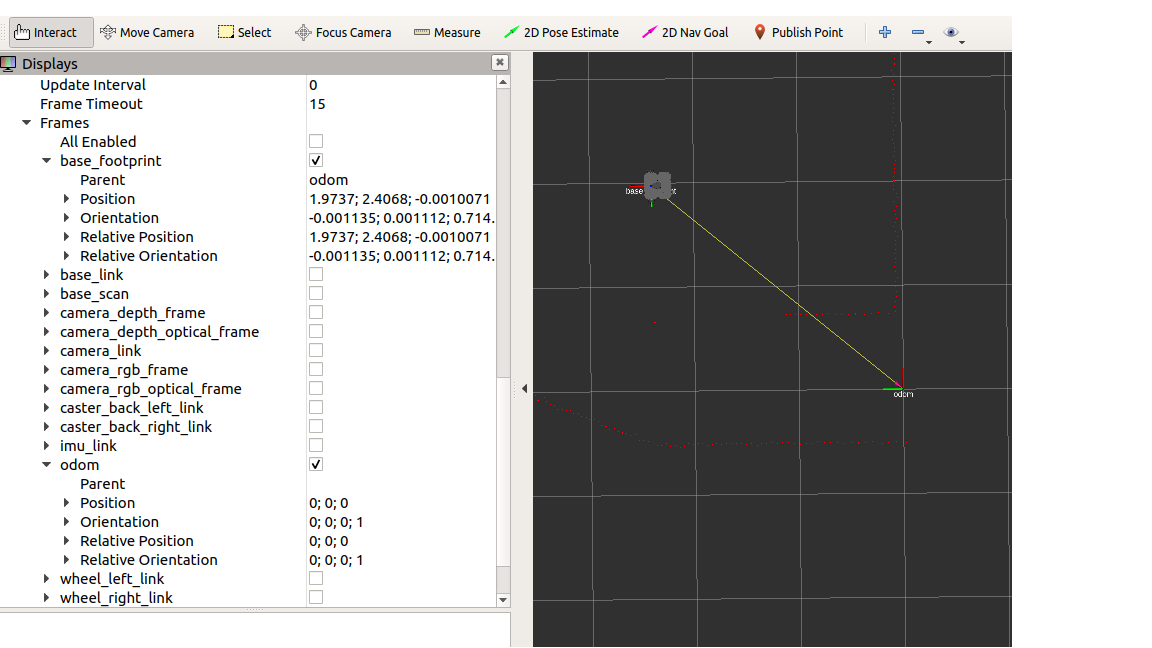
Hello everyone. When I launch a map in gazebo with the turtlebot 3 the topic / odom is located in the coordinates 0,0,0 of the map and it stays like that, giving “/ base_footprint” positions and orientations relative to the robot. How can I modify the position of the odom topic to other coordinates of the map where the robot is located so that it gives me new positions and relative orientations?
thank you very much for your help.