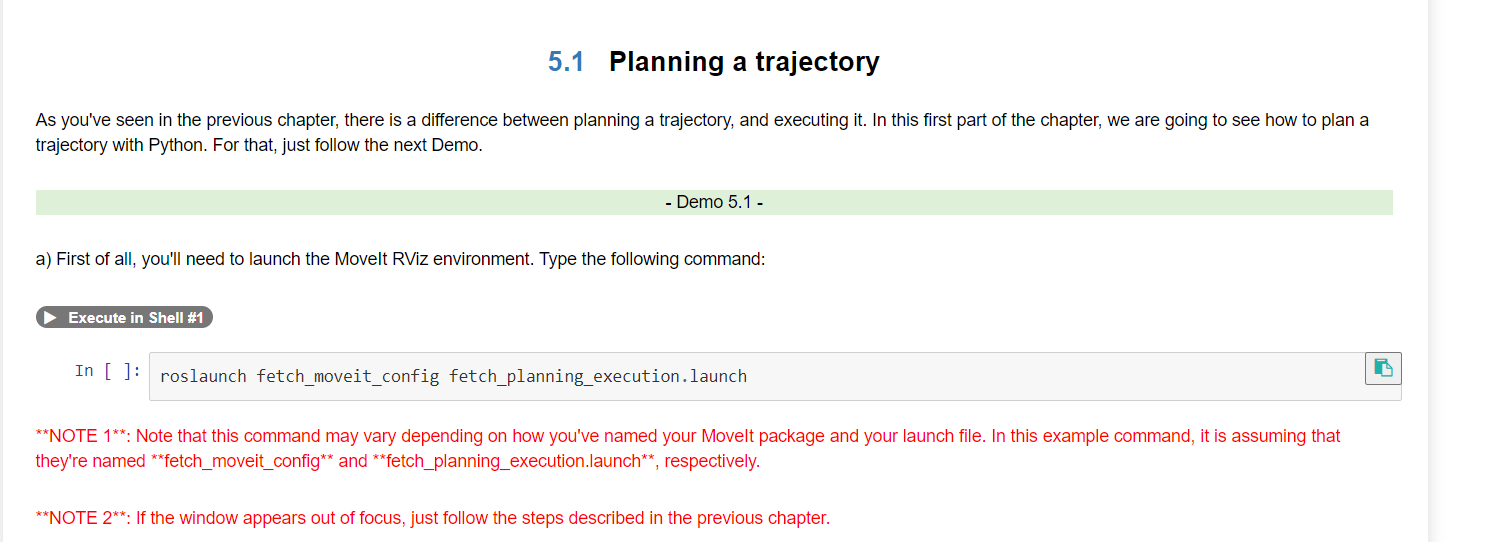
As suggested in the Exercise 5.1, I am stuck in creating fetch_planning_execution.launch file. What content am I suppose to put in this launch file?
Someone please help me in this direction
As suggested in the Exercise 5.1, I am stuck in creating fetch_planning_execution.launch file. What content am I suppose to put in this launch file?
Someone please help me in this direction
Hi @SaiTeja104 ,
Welcome to this Community!
If you had been following the course properly, you would have understood what goes in to the fetch_planning_execution.launch file. A similar file was designed in the previous chapter, go through that if you have any issues.
Anyways, without giving you the contents directly, I will tell you what you should put in there:
planning_context.launch file from fetch_moveit_config.joint_state_publisher.move_group.launch from fetch_moveit_config package.moveit_rviz.launch from fetch_moveit_config package.Regards,
Girish
Thanks for your help
Hi Girish
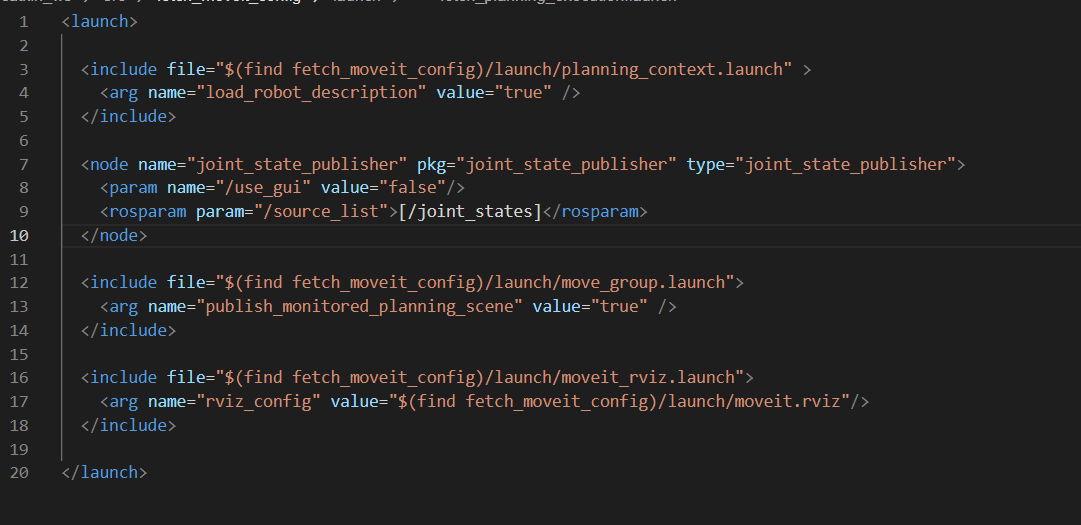
Below is the image of launch file, I have written. After launching this file, the robot is not responding in the simulaation.
Am I missing anything here? Please guide me.
Thanks in advance
Hi @SaiTeja104 ,
The Fetch robot used in the simulation is really slow. Also the chances of it working is a bad probability. You need to restart the simulation a few times so have the robot do some movement.
At the end, the robot will work, for sure. But it just takes some tries, because it is running on ROS1 and MoveIt for ROS1 lacks some features.
Regards,
Girish
This issue is resolved now. I made a mistake while creating fetch_moveit_config package earlier.
I followed step by step to create fetch_moveit_config package once again, and it worked.
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.