I am trying to simulate bb8 on my local machine .https://bitbucket.org/theconstructcore/bb8/src/master/
I have already done the following
Installed ROS according to wiki instruction
created a folder catkin_ws/src and ran catkin_make inside it.
Then inside catkin/src i cloned the repo .
After this what should i do ?
I am already half way through the course , but i dont feel confident unless i run the same environment in my local machine .
Thank You
sir when i do catkin_make it says joycontrol.cmake is missing ?
sir when i do catkin_make it says joycontrol.cmake is missing ?
@bayodesegun sir i need help in compiling the bb8 package in local machine. when i do catkin_make i get joycontrol.cmake is missing what should i do?
ralves
January 3, 2020, 10:54pm
6
Hi @vasank1958 ,
the joycontrol.cmake is missing because you need to install the ros-kinetic-joy package, assuming you are using ROS Kinetic .
In ROS Kinetic, these are the steps I used to create the catkin_ws:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
source /opt/ros/kinetic/setup.bash
catkin_make
Now download the repository, on the branch kinetic-gazebo-7 :
cd ~/catkin_ws/src
git clone --branch kinetic-gazebo7 https://bitbucket.org/theconstructcore/bb8
When trying to compile, we have the dependency you mentioned, among others. I solved them with the commands below:
sudo apt-get update
sudo apt-get install ros-kinetic-joy
sudo apt-get install ros-kinetic-control-toolbox
sudo apt-get install ros-kinetic-robot-controllers
sudo apt-get install ros-kinetic-gazebo-ros
sudo apt-get install ros-kinetic-gazebo-plugins
sudo apt-get install ros-kinetic-rgbd-launch
Now you should be able to compile:
cd ~/catkin_ws
catkin_make
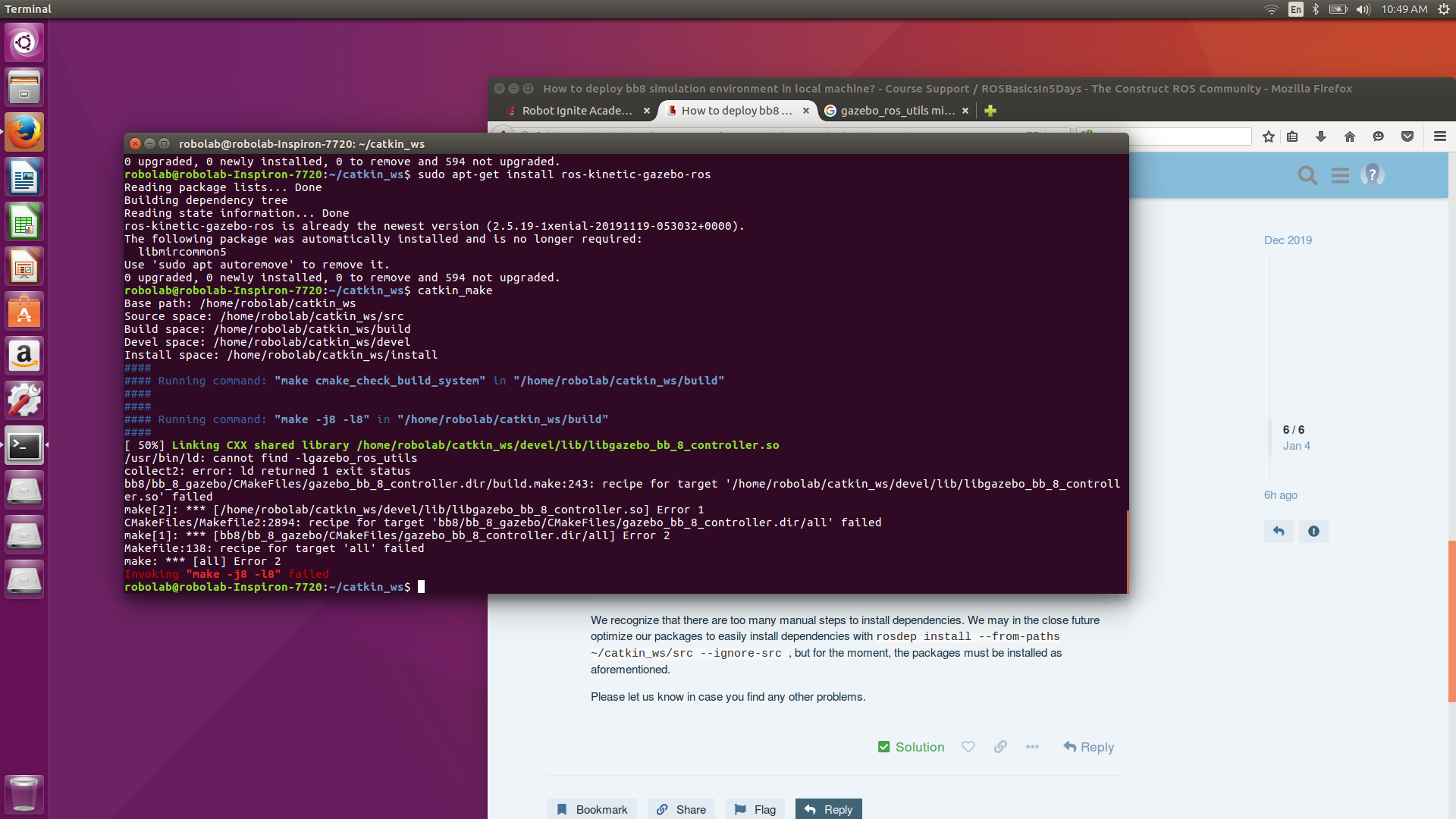
We recognize that there are too many manual steps to install dependencies. We may in the close future optimize our packages to easily install dependencies with rosdep install --from-paths ~/catkin_ws/src --ignore-src , but for the moment, the packages must be installed as aforementioned.
Please let us know in case you find any other problems.
1 Like
cmake is stuck at this error cannot find -lgazebo_ros_utils . I have done all sudo apt-get install@ralves
@ralves sir i still couldnt overcome the -lgazebo_ros_utils error can you help ?
ralves
January 21, 2020, 8:39pm
9
Hi @vasank1958 , did you manage to solve the -lgazebo_ros_utils issue?
no sir . Still couldnt get it working.
@ralves sir help? I still couldnt get it run successfully in my local machine.
ralves
January 27, 2020, 10:54pm
12
Hi @vasank1958 ,
sorry for the late reply. Due to time constraints, I wasn’t able to follow up.
I’ll try to reproduce the issue again and come back to you by tomorrow.
2 Likes
ralves
January 28, 2020, 8:43pm
13
Hi @vasank1958 ,
I just updated the bb8 repository, removing gazebo_ros_utils from the CMakeLists.txt found on the bb_8_package and now it should compile fine.
Could you try cloning the repository again and compiling it?
If for any reason you get an error like:
No rule to make target '/opt/ros/kinetic/lib/liborocos-kdl.so.1.3.2', needed by '/root/catkin_ws/devel/lib/libgazebo_bb_8_controller.so'
this can be solved with:
sudo ln -s /opt/ros/kinetic/lib/liborocos-kdl.so /opt/ros/kinetic/lib/liborocos-kdl.so.1.3.2
Please let us know in case you find any other issue when compiling.